지금껏 로봇에 대한 유토피아적 기대와 디스토피아적 우려가 공존하며 계속 토론의 주제가 되고 있음에도 불구하고 현실에서는 로봇의 존재가 미미했던 게 사실이다.
사람을 대신해 시킬 수 있는 일이 너무나 제한되다 보니 로봇은 가격만 비싸고 멍청하거나 쓸모 없다는 인식도 많았다. 그러다 보니 글로벌 주식시장 내에서도 순수 로봇만 영위하는 기업의 존재는 의미를 찾기 힘들 정도로 낮았다.
글로벌 테크 자이언트 기업도 이런 인식을 모를 리 없다. 그럼에도 현시점에 일제히 로봇을 차세대 성장동력으로 제시하는 이유가 무엇일까? 로봇을 적극적으로 활용할 수 있는 기술적인 기반이 완성되어 가기 때문일 것이다. 이를 살펴보면,
(1) 인식기술의 고도화
로봇은 크게 이동부와 작업부로 구성된다. 이동부(移動部)는 사물을 인식하고 장애물을 회피할 뿐 아니라 이동경로에 대한 계획을 수립하고 또 실행해야 한다. 작업부(作業部)도 대상이 되는 물체를 정확히 인식 후 End-effector 를 통해 잡고(Pick) 내려놓는(Place) 행위를 해야한다.
따라서 이미지 인식기술은 로봇의 주요기능에 반드시 필요한 핵심기술인 것이다. 이런 이미지 인식기술이 첨단센서와 인공지능의 도움으로 비약적으로 발전했다. 이미 인공지능의 보는 능력이 인간을 추월하고 있다.
ImageNet 챌린지에서 캐나다의 토론토 대학이 딥러닝을 이용해 획기적 인식률을 선보인 2012 년 이후, 해마다 인식률이 크게 높아지고 있다. 특정 사물을 분류하거나 검출, 분할 하는 등의 프로세스를 구글이나 마이크로소프트 등 업체들이 경쟁적으로 발전시켜 이제는 인간보다 더 정교한 수준의 인식이 가능하게 된 것이다.

뿐만 아니라 딥러닝의 구조상 엄청난 양의 데이터를 필요로 하거나 학습화되지 못한 패턴에 대한 처리불가 문제를 해결할 수 있는 경량화된 모델도 등장하고 있다.
(2) 초연결의 시대
예전에는 생각하지도 못했던 초고속통신망이 보급되며 로봇이 네트워크로 연결될 수 있는 시대가 되었다. 이른바 초연결사회(Hyperconnectivity Society)가 되어가고 있는 것이다. 인터넷, 초고속통신, 클라우드 등의 발달에 따라 네트워크로 사람, 데이터, 사물 등 모든 것이 연결되어 가고 있다.
기존의 로봇은 이런 초연결의 도움없이 자체적으로 인지-판단-제어의 기능을 다 갖춰야 했다. 로봇의 몸에 여러가지 기능을 하는 부품을 넣어야 하다보니 몸집이 크거나 성능이 크게 부족할 수밖에 없었다.
하지만 이제는 초고속통신의 도움으로 로봇의 지능을 몸체가 아닌 클라우드에 설치할 수 있게 되었다. 일명 클라우드로보틱스가 가능해진 것이다. 로봇이 제대로 활동하기 위해선 목표나 장애물을 감지하고 이를 회피하거나 경로에 대한 계획, 작업을 수행하기 위한 행동이 가능해야 한다. 또 불완전한 정보나 잘못된 예측에 의한 불확실성에도 이를 극복할 수 있는 완전성이 요구되기도 한다.
하지만 이를 위해선 엄청난 양의 데이터나 소프트웨어가 필요하나 전부 로봇내에 내재화하기란 사실상 불가능하다.
또 좁은 공간에 많은 로봇이 활동하기 위해서는 로봇과 로봇이 상호 교신을 할 수 있어야 하며, 건물이나 도시에서 여러 인프라와 상호 교신이 가능해야 한다. 예를 들면 건물의 엘리베이터나 출입게이트와 상호 통신을 통해 로봇의 이동이 자유로워야 할 것이다.
클라우드로보틱스가 가능하다는 것은 로봇의 성능이 Update 를 통해 지속적으로 개선될 수 있으며, 데이터 증가에 따른 지능향상도 가능하다는 의미다. 점차 초고속통신의 지연성은 줄어들 것이며, 클라우드의 용량과 빅데이터, 인공지능의 능력은 상향될 것이 자명하다.
초기 로봇의 지능이 일부 작업에 국한되고 사람의 기대에 미치지 못함에도 불구하고 미래를 밝게 보는 이유도 바로 이 클라우드 로보틱스의 존재 때문이라 말할 수 있다. 로봇이 사용되는 용처(用處)마다 축적된 데이터를 바탕으로 다양한 Solution 이 마련될 것이므로 초고속통신을 통해 역할을 다양하게 Download 받을 수도 있을 것이다.
예를들면 바둑에 정통한 알파고에서 얻어진 학습능력을 초고속통신을 통해 주방 도우미 로봇에 순식간에 업로드 한다면 곧바로 세계최강의 바둑고수가 될 수도 있다는 말이다. 자율주행도 마찬가지지만 로봇 역시 업데이트가 가능한지가 중요해질 수밖에 없다.
(3) 로봇의 뇌가 완성되어가는 시기
로봇에 대한 기대감이 커지고 있는 것에는 여러가지 이유가 있겠지만, 무엇보다 로봇을 구현함에 있어 가장 높은 장애물이었던 ‘머리’, 즉 AI 에서 새로운 Solution 이 나오고 있기 때문이 아닐까 생각한다.
로봇이 기계가 아닌 로봇으로서 역할을 제대로 하기 위해선 머리(AI), 팔(Manipulator), 다리(Legs or Wheels)가 제대로 갖춰져야 한다. 뿐만 아니라 인지-판단-제어의 3 단계 프로세스 모두가 원활히 작동해야 한다.
그동안 인지(Perception)와 제어(Actuating)기술의 빠른 고도화에도 불구하고 판단(Cognition) 영역에서의 한계로 인해 로봇산업이 정체되어 있었던 것이다. 몸은 그나마 쓸만한데 머리가 나빠 일을 시킬 수 없었다고 표현할 수 있겠다.
4 족보행 로봇들이 자갈밭에서도 뛰고 쉽게 장애물을 점프하는가 하면, 보스톤다이나믹스의 로봇들이 묘기에 가까운 몸동작을 보이는데 성공했지만, 사람의 컨트롤 없이 실생활에 투입되기 어려운 것도 이 같은 이유 때문이다.

이 판단의 영역이 AI 의 발전으로 인해 어느정도 해결될 수 있겠단 자신감이 생긴 시점이 지금이 아닌가 싶다.
테슬라와 엔비디아가 각각 AI Day 와 GTC2022 에서 AI 에 대한 자신감을 피력함과 동시에 차세대 주력 기술로 로보틱스를 선정한게 우연이 아니라 본다. 특히 온라인 상에서 힘을 발휘하던 AI 가 물리세계의 자율주행이나 로봇에 깊게 개입할 수 있음을 보여준 행사였다.
보수적인 삼성그룹 역시 이 시점을 전후해 로봇 출사표를 던졌다. AI 라는 높은 장애물을 극복한 업체만이 로봇에서 살아남을 수 있다. 동시에 초기 로봇기술에서 격차가 발생하면 오랜시간 시장을 선도업체에 내줄 수밖에 없다는 절박감도 작용했을 것이다.
그동안 학계와 산업계에서는 다양한 방식의 AI 를 영역별로 테스트해왔다. 최근 들어서는 초거대규모의 데이터를 다룰 H/W 기술이 생겼음은 물론이고 xNN 으로 표현되는 다양한 신경망 학습과 이들의 파생, 하이브리드 AI 가 등장하기도 했다.
궁극적인 지향점이자 인간과 같은 지적능력인 AGI(Artificial General Intelligence)까지는 여전히 갈 길이 멀지만, ANI(Artificial Narrow Intelligence)수준에서 최근의 노력들은 한정된 용도별로 가장 적합한 AI 의 솔루션들을 찾아가고 있다. 여기에 다양한 신체기관을 연결시켜주는 ‘아키텍쳐’와 감각기관인 ‘센서’의 고도화도 함께 진행되고 있어 인지-판단 영역이 빠르게 성장하고 있는 것이다.
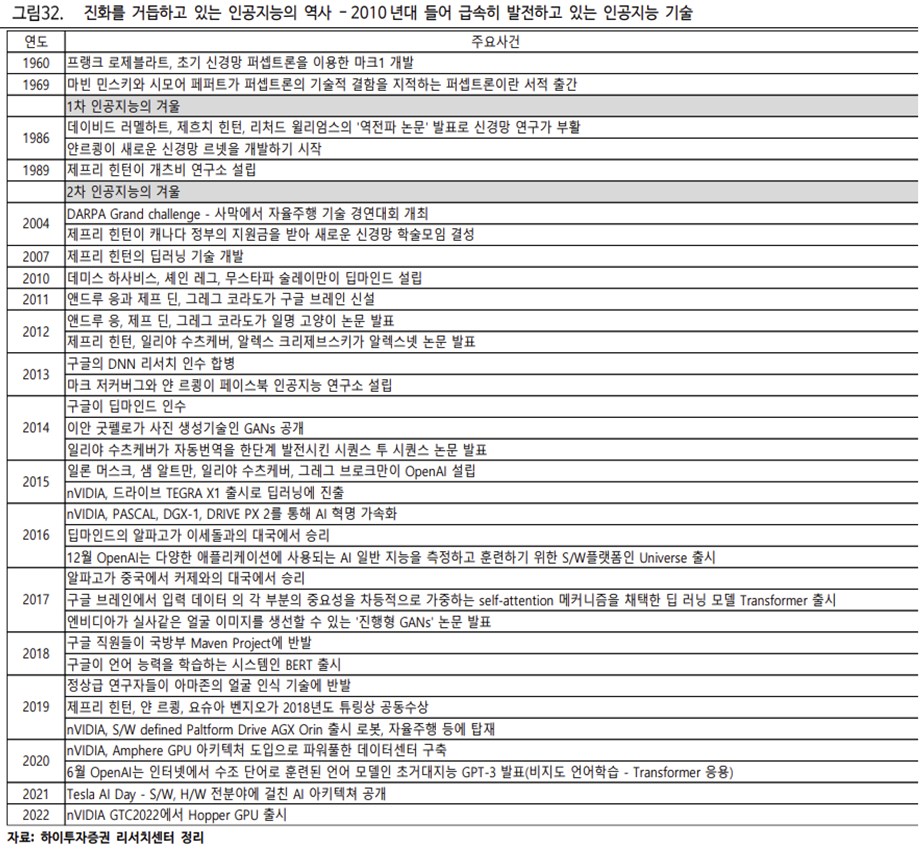
그동안 발전에 발전을 거듭한 AI 를 간단히 살펴보면, 2012 년 Imagenet Challenge 에서 딥러닝의 우수성을 깨달은 이후 다양한 시도가 이어져왔다. 2016 년 한국에서도 AI 에 대한 큰 관심을 불러일으켰던 알파고를 비롯해 2017 년에는 구글이 자연어처리(NLP:Natural Language Process)에 있어 획기적인 Transformer 를 내놓았다.

Transformer 이후 정말 다양한 모델이 파생되어 나왔고, OpenAI 에 의해 초거대규모의 모델인 GPT(Generative Pretrained Transformer) 가 등장하는가 하면, 언어로 시작해 컴퓨터비전까지 적용되며 새로운 인공지능의 경지를 열기에 이르렀다. 다양한 모델들은 상호 영향을 끼치며 발전하거나 혼용되면서 서로의 단점을 보완하기 시작했다.
이런 경향으로 정말 많은 인공지능 모델이 탄생되었고 용도에 적합한 모델을 선택해 사용하거나 혼용할 수 있게 되었다.
이렇게 확장되고 있는 AI 기술 중에서도 최근 큰 관심을 받고 있는 핵심기술과 트랜드를 간추려 보면 다음과 같이 정리해볼 수 있다.
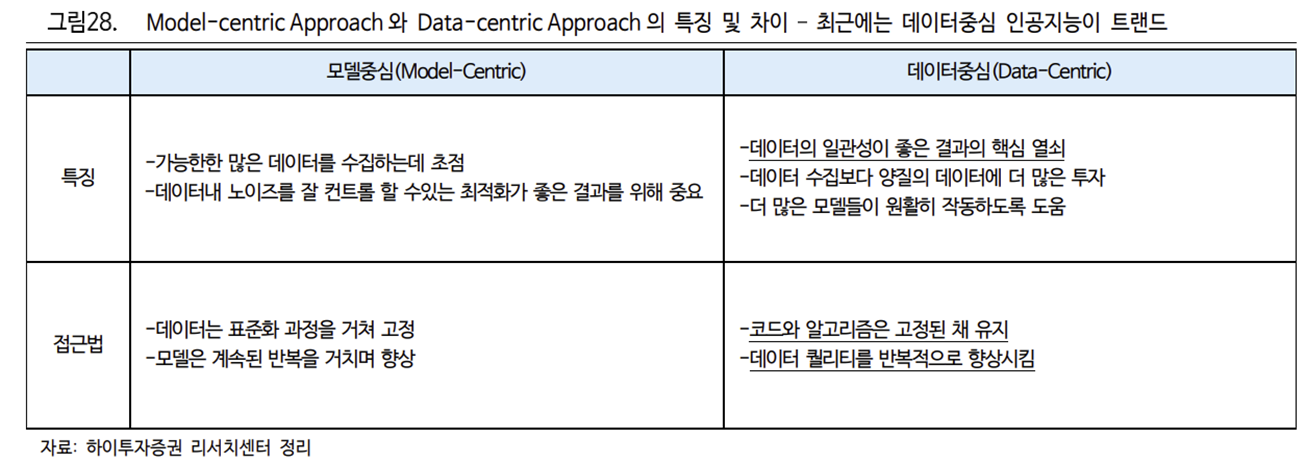
1) 모델중심(Model centric)에서 데이터중심(Data centric) 인공지능으로
기존의 인공지능 모델은 데이터는 전형적인 전처리과정 후에 고정되어 있고 모델과 알고리즘만 반복적으로 향상시키는 방식이었다. 다시 말해 데이터의 양을 최대한 모으되 노이즈가 있더라도 전체적인 틀에 문제가 없을 정도로만 모델을 최적화하는 것에만 집중해왔다.
하지만 최근 경향인 데이터 중심 AI 는 코드와 알고리즘의 프레임은 건드리지 않고, 데이터를 반복적으로 향상시켜 ‘양질화’ 하는데 집중한다. 최상의 예측 분석 결과는 체계적으로 잘 정돈된 데이터로부터 출발한다는게 핵심이다.
따라서 필드에서 경험이 많은 전문가들에 의해 데이터가 처음부터 최적의 상태로 취합되도록 만드는 것이 중요하다. 이로 인해 일관성 있는 데이터 레이블을 유지하고 양질의 결과물이 도출될 수 있는 것이다.
성공적인 데이터 중심 인공지능을 위해선 ①데이터클리닝 (Cleaning), ②데이터통합 (Integration), ③데이터변환 (Transformation), ④데이터축소 (Reduction), ⑤데이터이산화 (Discretization) 등 Poor Data 를 합목적성을 가진 품질 좋은 데이터로 전처리(Preprocessing)하는 기술이 중요할 수밖에 없다.
90% 이상의 의미 없는 데이터를 걸러내고 의미 있고 일관성 있는 Data set 을 통해 파라미터를 크게 줄일 수 있게 된다면, AI 성능은 고도화될 수 있는 것이다.
2) 초거대(Hyper-scale) 인공지능의 등장 –자기지도학습과 HPC 의 결합
또 하나의 큰 변화는 무어의 법칙을 뛰어넘는 빠른 AI 기술향상을 꼽을 수 있다. AI 학습모델은 매년 10 배씩 빨라지고 있으며 용도별 종류와 접근법도 다양해지고 있다. 알파고 이후 언어모델에서 획기적 변화를 만들어 낸 구글의 Transformer, BERT, GPT(Generative Pre-trained Transformer) 등 정말 다양한 AI 기술들이 등장했다.
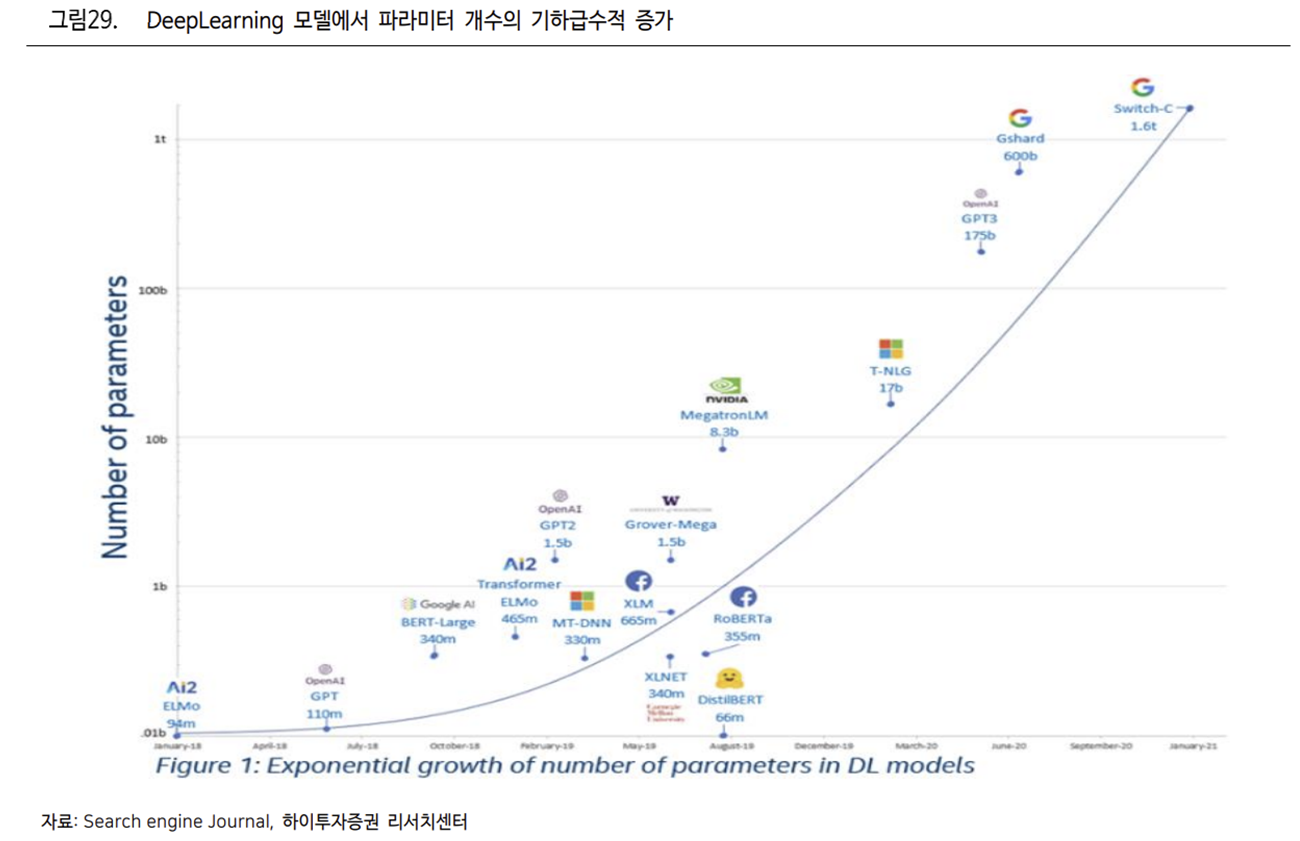
특히 자기지도학습(Self-supervised Learning)이 가능해지면서 대용량 연산이 가능한 컴퓨터 파워를 기반으로 거대한 수의 파라미터를 처리하는 Hyperscale AI(초거대인공지능)도 등장했다. 일론머스크가 이끄는 오픈 AI 가 만든 GPT3 의 경우, 파라미터의 개수가 무려 1750 억개에 달해 세상을 깜짝 놀라게 했다.
구축비용이 비싸고 막대한 전력이 소모되지만 이전 딥러닝에 비해 획기적 결과를 도출해낸다. 인공지능에서도 부익부빈익빈이 발생할 상황인 것이다.
이에 자극받은 많은 업체들이 이 분야에 뛰어들었다. Google 은 GPT-3 보다 6 배 많은 1 조 6 천억 개의 매개변수가 있는 Switch Transformer 아키텍처의 모델을 발표했다. 국내에도 네이버, LG, KT, SKT, 카카오 등 대기업이 초거대 AI 에 속속 발을 들이고 있는 추세다.
바야흐로 초거대 인공지능의 시대가 열린 것이다. 경쟁심화에 따라 컴퓨팅파워의 획기적 개선 시도가 뒤따르게 되었고, 많은 업체들이 새로운 성능의 HPC(High Performance Computer)를 내놓기에 이르렀다.
3) 인공지능의 값이 싸진다 – 누구나 AI 를 사용할 수 있는 시대
AI 는 크게 추론과 학습(훈련)으로 나뉘어지며 사용 용도에 따라 총비용이 달라질 수 있다. 데이터를 모으고 라벨링 하는데도 상당한 비용이 수반된다. 인공지능의 고도화를 위해서는 고사양의 H/W 와 양질의 데이터 취득이 필요하다. 하지만 최근에는 AI 관련 하드웨어와 소프트웨어 비용이 연간 60% 이상 하락하는 과정이 진행되고 있다.
최근 획기적으로 사양이 높아졌음에도 가격부담이 제한적인 H/W 가 출시되면서 인공지능의 비용이 감소하고 있는 것이다. 스스로 학습하는 딥러닝 알고리즘은 물론, AI 개발을 전과정 자동수행하는 시스템도 등장했다. 데이터 라벨링이 어느정도 진행되었다는 가정하에 개발 코드가 자동 생성되는 Auto ML 기능도 등장해 AI 모델을 쉽게 만들 수 있다.
뿐만 아니라 유지보수도 인력투입 없이 자동 모니터링과 재학습을 통한 AI Upgrade 기술이 속속 등장하고 있다. 토론토 대학 Avi Goldfarb 교수는 AI 의 비용이 반도체처럼 급격히 하락할 것이며, 이로 인해 다양한 영역에서 인간의 AI 의존도는 높아지고 활용도 역시 증가할 것임을 예측하였다.
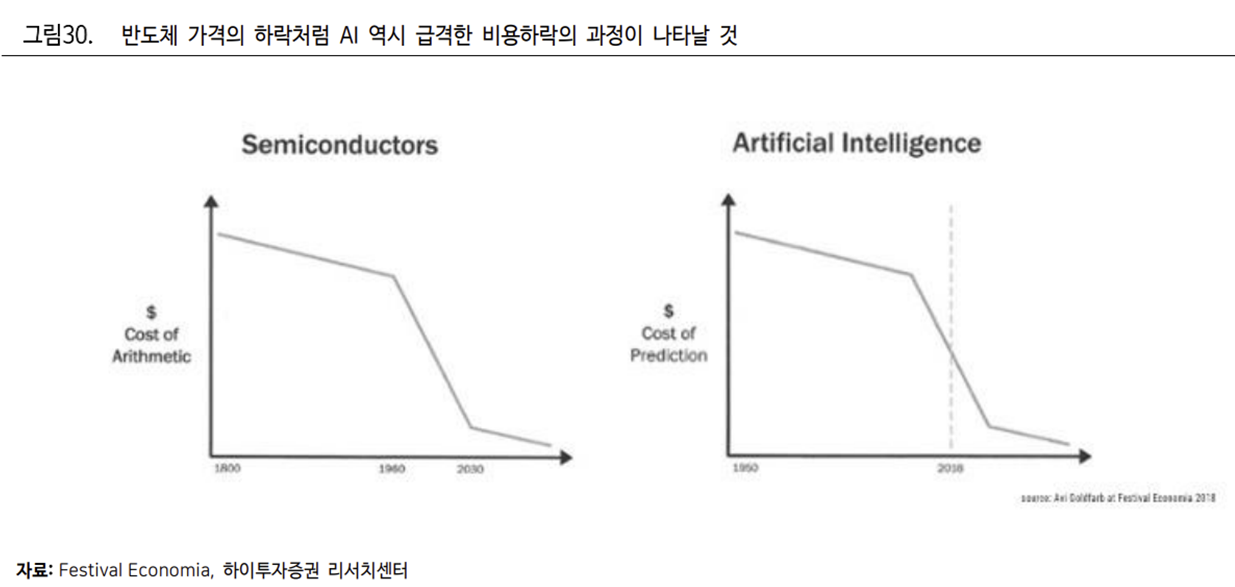
이렇듯 빠른 기술 향상으로 점차 모든 산업에서 인공지능을 도입하는데 소요되는 비용이 크게 줄 것이다. 이러한 변화는 로봇산업에도 반가운 소식이 아닐 수 없다.
4) 용도별 인공지능의 발달과 이들 간의 융복합
신경망학습의 기본단위인 퍼셉트론(Perceptron)은 실제 뇌를 구성하는 신경 세포 뉴런의 동작과 유사하게 만들어졌다. 신경 세포 뉴런의 입력 신호와 출력 신호가 퍼셉트론에서 각각 입력값과 출력값에 해당되도록 만들었기 때문이다.
신경 세포 뉴런에서의 신호를 전달하는 축삭돌기의 역할을 퍼셉트론에서는 수학적 가중치(Weight)가 대신하게 된다. 즉 입력값, 가중치, 출력값이 퍼셉트론의 뼈대를 이루게 되는 것이다. 이런 퍼셉트론을 여러 개 연결하여 심층적인 학습이 되도록 만든 것이 다중 퍼셉트론, 혹은 DNN(Deep Neural Network)이다.
인공지능은 크고 작은 컴퓨터에 인공적인 신경망을 추가해 학습시킨 다음 스스로 ‘판단’ 할 수 있도록 만든 것이다. 합성곱신경망(CNN)은 이런 원리에 보다 특징적인 필터를 추가해 모델을 경량화시켜 더욱 빠르고 쉽게 결과를 얻도록 설계되었다.
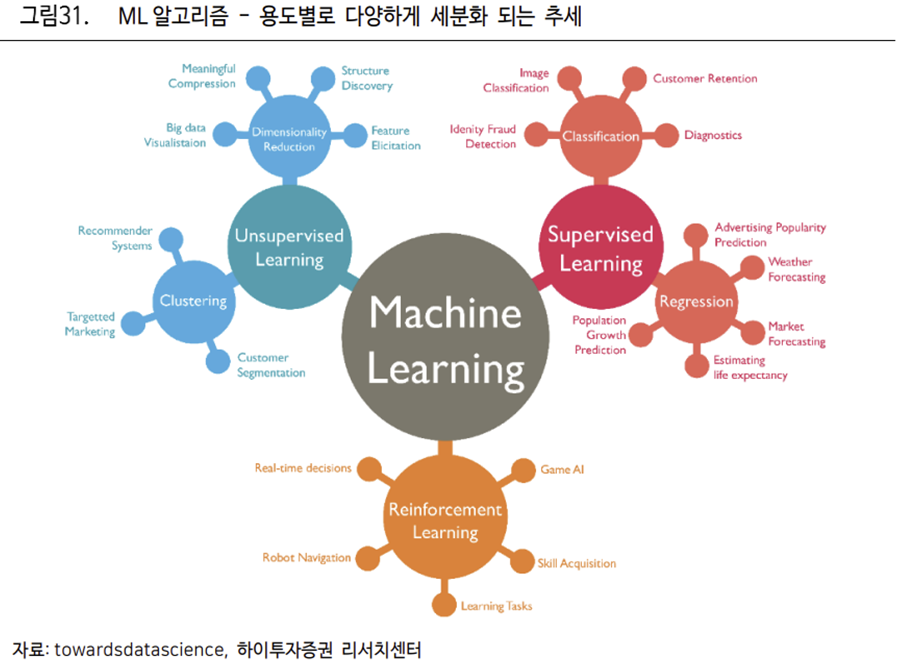
인공지능은 어려 분야에서 다양한 모델을 통해 세분화될 뿐 아니라 문제를 극복하는 과정에서 진화하고 있는데, 이제는 이들 이종모델들이 서로에게 영향을 주며 융복합되기에 이르렀다.
인공지능의 궁극의 목표인 범용인공지능(AGI)이 이뤄지기 위해서는 언어를 이해하고, 보이는 것들을 이해해야 하며, 가장 효과적인 운동제어 능력을 소유해야 한다.
분명 사람은 로봇에게 다양한 능력을 요구하게 될 것이다. 이에 각기 다른 용도로 훈련된 인공지능들이 통신과 클라우드로 연결되고, 엣지컴퓨터에 OTA 로 Deploy 되면서 상황에 맞는 로봇의 능력구현으로 나타날 것이다.
5) 운동 인공지능의 필요성
사람이나 동물처럼 살아있는 듯한 지능로봇을 개발하고 구현하기 위해선 운동인공지능(Physical artificial intelligence) 구현이 반드시 필요하다. 운동인공지능은 재료과학, 기계엔지니어링, 컴퓨터과학, 생물학, 화학 등 여러 학문이 융복합 되어야 비로소 그 성능을 발휘할 수 있다.
알파고가 바둑의 최고수를 연달아 이기는 상황에서도 살아있는 듯한 로봇이 아직까지 등장하지 않은 이유는, 운동인공지능이 컴퓨터 인공지능 분야의 기술발전 속도를 따라오지 못하고 있기 때문이다.
그동안 디지털 인공지능에 대한 연구는 다방면에서 다양하게 이루어져 왔지만, 정작 운동지능 분야에 숨결을 불어넣는 작업은 미흡했던 것이 사실이다.
로봇이 사람의 비정형적인 움직임까지 데이터화 해서 학습하게 된다면 향후 휴머노이드 로봇 기술도 비약적으로 발전할 수 있을 것이다. 인공지능에게 운동영역에서 학습을 위해서는 모터제어, 운동/자세제어, 측위제어 등이 필요하다.
모터에서 나오는 토크 데이터와 액츄에이터 각도 데이터, IMU 센서 등에서 나오는 데이터를 모두 연계해서 딥러닝으로 학습시킬 수 있으며, 객체 인식과 운동제어, 모터제어를 하나의 알고리즘으로 수행하게 되면 속도도 빨라지고 판단도 더 정교해질 수 있다.
이 밖에도 센서에 의한 학습이 아닌, 사람의 행동을 학습하기 위해 햅틱 디바이스를 이용하는 학습방법도 있다. 즉, 웨어러블 HMI(Human Machine Interface)를 착용하고 사람의 운동을 그대로 전달해 로봇을 학습시키는 방법이다.
6) 물리세계에 대한 이해 (PINN: Physics-Informed Neural Networks)
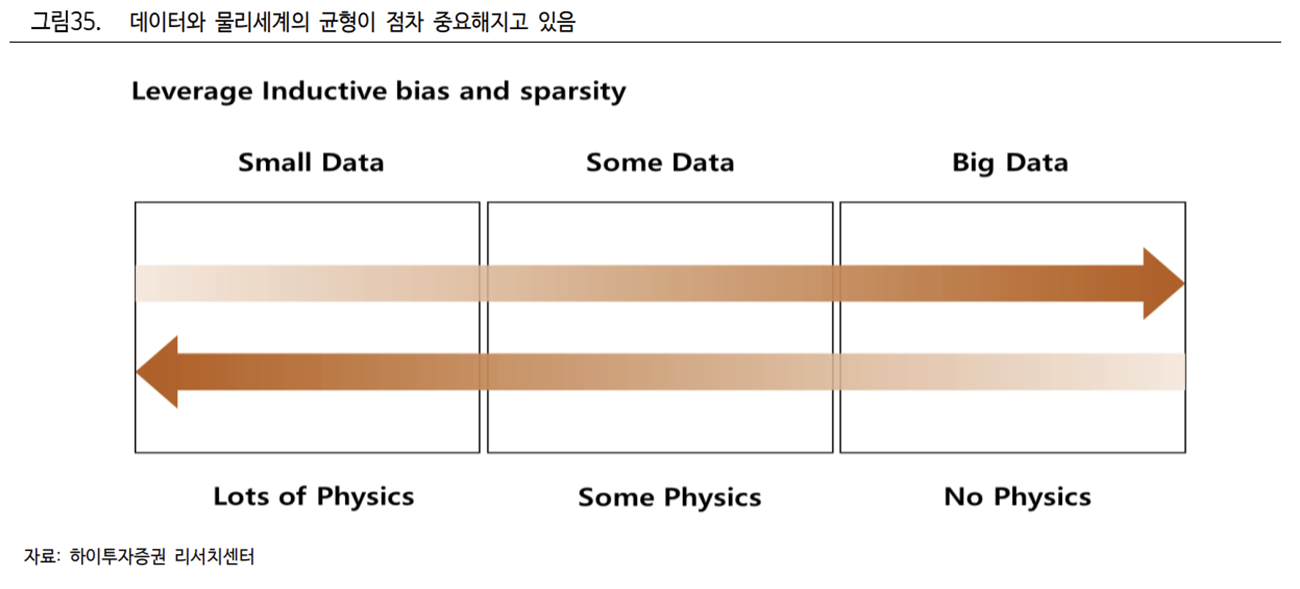
대부분의 접근이 데이터에 의존하고 있으나 디지털의 물리세계에 대한 이해가 너무 떨어져 기계공학과 AI 의 접목에도 좋은 성과를 내기가 어려웠던 것이 사실이다. 유체나 탄성, 변형체의 운동법칙 등을 모델링 하기 어려웠기 때문이다.
시스템을 관통하는 일반적인 물리법칙이 인공지능에 접목되어야 현실세계에서 에러를 줄일 수 있을 것이다. 기존의 신경망이 데이터에 포함된 물리법칙을 고려하지 않고 단순 데이터에만 의존했다면, 물리정보 신경망(PINN)은 편미분 방정식을 충족하도록 강제하며, 편미분 방정식에 내재되어 있는 물리정보를 신경망에 도입한다. 이를 통해 신경망 학습에 필요한 데이터를 줄일 수 있고 학습 속도를 더 빠르게 만들 수 있다.
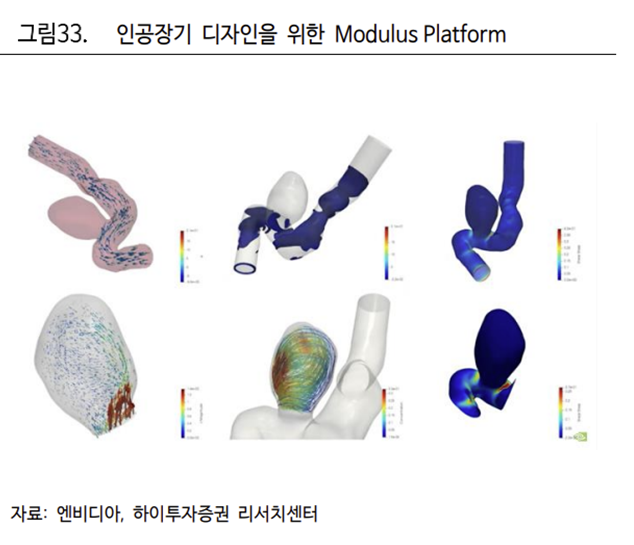
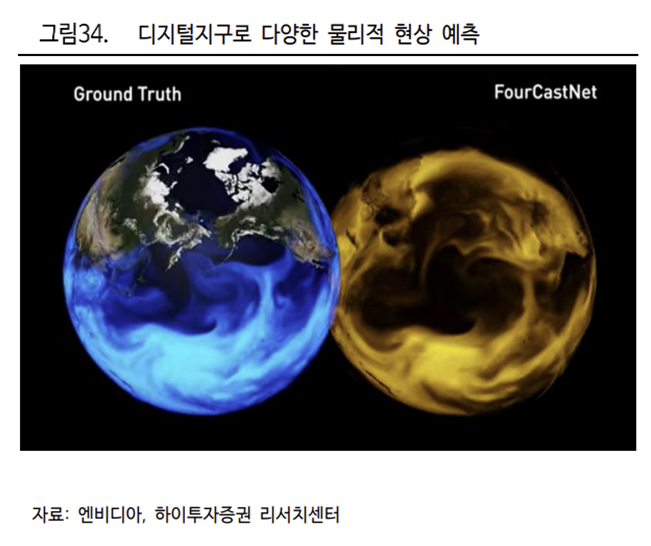
예를 들어 엔비디아의 Modulus Platform 은 데이터 과학과 물리학을 적용해 AI 가상 모델을 만드는 신경 네트워크를 훈련시킬 수 있다. 이를 디지털 트윈인 옴니버스와 연동시켜 다양한 용도로 사용할 수 있는 다중물리 프레임이라고 볼 수 있다. 모듈러스는 헬스케어에 물리법칙을 이용해 인간의 신체장기에 대한 분석을 하고, 디지털 지구를 만들어 허리케인이나 구름의 이동 등 다양한 물리적 현상을 예측할 수 있다.
지금까지 다량의 데이터만 있으면 해결될 것 같았던 많은 물리세계의 난제들이 디지털의 물리법칙 몰이해로 인해 풀리지 않았다. 하지만 최근의 흐름은 데이터와 물리법칙의 조화를 추구하는 방향으로 진행되며 이를 해결하고 있다.
특히 로봇은 데이터를 기반으로 한 AI 와 물리세계에서의 다양한 작업을 위한 기계가 일치될 때 최상의 성능을 발휘할 수 있다는 측면에서 이러한 기술적 변화가 큰 도움이 될 수 있다.
7) 기타
이외에도 로봇의 머리에 해당하는 AI 발전은 다양한 방면에서 이뤄지고 있다. 스스로 직관을 개발하고 본능에 따라 행동하는 AI 를 추구하는 Cognition computing 이라던지, 아직 상위수준의 코더에 비해서는 부족함이 많지만 코딩 문제를 자율적으로 해결할 수 있는 AI coding 도 등장했다. 예를 들면 Deepmind 의 Alpha code program 이 여기에 해당한다. 초기 버전에 비해서는 점점 더 유연하게 코딩할 수 있는 실력으로 진화하고 있다.
최근엔 마이크로소프트, 아마존도 세상을 바꿀 기술로 ‘Nocode’를 지목, 기술개발에 매진하고 있을 정도 뜨거운 관심을 받고 있다. 복잡한 Coding 없이 원래 존재하던 기능들을 ‘명령어 블록’ 방식으로 선택해 조합시키는 방식도 Nocode 에 해당한다. 컴퓨터 언어를 몰라도 프로그램을 만들 수 있는 기술이다.
딥러닝(Deep Learning)에서 지도학습(Supervised Learning)을 하는 경우, 주어지는 다양한 데이터에 대해 레이블을 붙여야 하는데, 이 과정에서 수동 레이블링의 경우 많은 인력과 비용, 시간이 소요될 수밖에 없다. 이에 최근에는 Auto labeling 에 대한 많은 연구가 이뤄지고 있기도 하다.
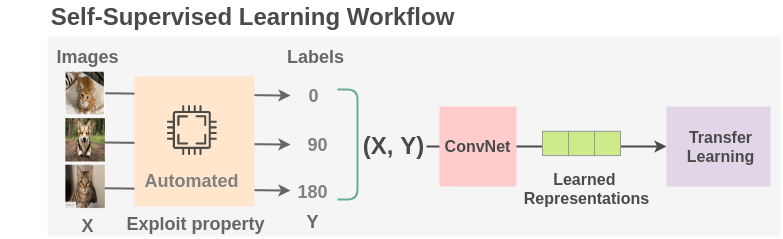
Code2.0 으로도 불리우는 Auto labeling 의 가능성은 자율주행과 로봇에 있어 매우 중요한 변화로도 해석된다. 이 기술이 성숙기를 맞이한다면 지금과는 상당히 많은 변화가 예상되기 때문이다.
자기지도학습(Self-Supervised Learning)도 대형 데이터센터를 소유한 기업이나 구글, 페이스북, OpenAI 같이 천문학적인 Parameter 를 확보한 기업 위주로 빠르게 성장하고 있는데 이를 해결할 하드웨어의 성능이 매우 중요하게 여겨지고 있다.
매개변수(Parameter) 1 조개 시대에 이를 해결할 수 있는 초고속 컴퓨터가 필요하다. 매년 10 배씩 성능이 향상되는 ‘Million-X’의 개념을 설명하며 향후 AI 를 위한 엄청난 컴퓨터 속도의 증가가 나타날 것이라고 예상된다.

이로인해 2nd AI Wave 로 행동계획 인공지능이 태동할 것이며, 대표적으로 로보틱스와 디지털트윈의 시대가 열릴 것을 자신하였다. 로봇에 특화된 로보틱스 플랫폼도 이에 발맞추어 진화할 것이며, IoT 의 확산과 5G 통신의 보급으로 인간의 지각능력과는 상대도 안될 정도로 한 대의 로봇이 다양한 소스로 정보를 받아들이고 무한대에 가까운 데이터를 사용할 수 있는 환경이 조성될 것이라는 것이다.
한사람의 작업자와 한 대의 로봇이 보유한 정보의 양을 비교할 수는 없을 것이다. 사람은 단독주체지만 로봇은 네트워크와 시스템의 서포트를 받을 수 있기 때문이다.
출처: 하이투자증권
뜨리스땅
https://tristanchoi.tistory.com/323
로봇 산업 탐구: 4. 로봇의 등장을 요구하는 사회적 토양
(1) 국가간의 갈등으로 분업 구조 와해, Reshoring: 인력부족과 고비용 로봇관련 기술이 대단한 속도로 진보하고 있는 것은 맞지만, 여전히 높은 가격대비 시킬 일이 제한되고 인간에 비해서 부족한
tristanchoi.tistory.com
'로보틱스' 카테고리의 다른 글
| 로봇 산업 탐구: 5. 테크기업들의 진출 - 엔비디아 (0) | 2022.08.24 |
|---|---|
| 로봇 산업 탐구: 5. 테크기업들의 진출 - 테슬라 (0) | 2022.08.23 |
| 로봇 산업 탐구: 4. 로봇의 등장을 요구하는 사회적 토양 (1) | 2022.08.23 |
| 로봇 산업 탐구: 2. 로봇은 왜 세상을 바꾸지 못하나? (0) | 2022.08.22 |
| 로봇 산업 탐구: 1. 어디까지 왔나? (0) | 2022.08.22 |




댓글