수십 개의 ECU가 복잡하게 연결된 구조의 분산형 E/E 아키텍처에서는 SDV 구현 불가능
전통적 차량의 E/E 아키텍처는 게이트웨이(서로 다른 근거리 네트워크간 연결 지점)를 중심으로 기능에 따라 수십 개의 ECU들이 차량 네트워크로 연결된 분산형 구조를 가지고 있다.

이러한 ECU 안에는 수십 개의 MCU가 탑재되어 정해진 기능을 수행한다. 기존 내연기관차에 들어가는 총 부품 수는 약 2~3만개로 이를 공급하는 부품사를 체계적으로 조직하고 관리하기 위해서는 분산형 구조가 유리할 수 있다.
스마트키, 디지털 대시보드, ABS 브레이크, 자동 헤드라이트, 자동 공조기, 엔진 제어, ADAS 등 전자적으로 제어되는 모든 기능들은 각각의 ECU를 통해 제어되며 엔진을 제어하는 ECM(Engine control module), 브레이크를 제어하는 BCM(Brake Control Module), 에어백을 제어하는 ACU(Airbag control unit) 등 수많은 ECU들이 존재한다.
기능이 추가된 신차가 개발되면 차량 내 ECU 개수는 점점 증가할 수 밖에 없었다. 이 때 ECU들은 서로 다른 Tier-1 업체들에 의해 독립적으로 개발되어 각각의 ECU들에 중복된 기능이 포함될 수 있고, 신뢰성 관점에서도 취약하다. 특히 다양한 제조사들이 각기 다른 펌웨어(하드웨어의 제어와 구동을 담당하는 일종의 운영체제)가 사용되기 때문에 성능 개선을 위한 소프트웨어 업데이트가 어렵다.
또한 차량 전체에 산재되어 있는 다수의 센서, 액추에이터들과 CAN(Controller area network) 통신 연결과 배선/배전을 해야만 하는 과정에서 차량 내 와이어링 하네스 복잡도는 매우 커질 수 밖에 없다.

중앙집중형 E/E 아키텍처로 SDV 시대를 연 Tesla
반면 기존의 전통 방식에서 자유로웠던 Tesla는 수십 개에 달하는 ECU를 중앙집중형 방식으로 통합했다.

차량의 하드웨어 플랫폼을 넘어 차체 소프트웨어 플랫폼을 구축하고자 한 것이다. 특히 전기차는 사용되는 부품수가 약 1만여 개로 내연기관 대비 약 35~40% 줄어든다는 점도 SDV 구현에 유리하게 작용했을 것이다. Tesla는 2014년 9월에 HW 1.0 플랫폼을 출시하면서 복잡한 구조의 분산형 E/E 아키텍처 대신 단 4개만의 ECU(오토파일럿 1개, 바디컨트롤 3개(좌/우/전방))로 구성된 중앙집중형 E/E 아키텍처 기반의 소프트웨어 중심적 제어 시스템을 구현했다(Model 3 기준). 또한 2019년부터 자체 개발한 SoC(System on chip)를 적용한 HW 3.0 플랫폼을 선보였다.

이를 통해 OTA 업데이트를 통해 차량의 오류, 제로백 시간 단축 등 자동차 성능의 개선을 소프트웨어로 구현하는 모델을 구축했고, 프리미엄 커넥티비티 서비스를 유료화하고 FSD(Full self-driving) 자율주행 시스템을 서비스 업데이트 형태로 제공하며 새로운 수익 모델을 창출했다. 이러한 중앙집중형 E/E 아키텍처는 SDV로 가기 위한 중요한 출발점이다.
SDV의 뼈대가 되는 중앙집중형 E/E 아키텍처 방식 ① 도메인, ② 존
기존의 완성차 제조사들이 기존 분산형 E/E 아키텍처 방식을 벗어나 소프트웨어 중심의 중앙집중형 E/E 아키텍처를 구현한다는 것이 쉬운 일은 아니다. 그러나 반드시 가지 않으면 안될 변화이며, 변화에 뒤쳐질 경우 경쟁에서 살아남기 어려울 수 있다.
차세대 자동차 E/E 아키텍처 핵심은 단순화와 통합이다. 이를 해결하기 위해 제안되는 방식이 도메인(Domain-centralized) E/E 아키텍처와 존(Zone) E/E 아키텍처이다.

현재 대부분의 전통 완성차 제조사들은 여러 개의 ECU를 기능별로 묶어 DCU(Domain control unit)로 통합해 도메인 E/E 아키텍처 구현을 실행하고, 단계적으로는 Tesla와 같은 존 아키텍처로 전환할 계획이다.
이러한 E/E 아키텍처는 차량 제어기능이 소프트웨어 중심적으로 구현됨으로써 전통적 차량에서는 불가능했던 시장과 고객이 요구하는 변화에 보다 효과적으로 대응할 수 있고, 차량 제어기능들이 중앙집중형 고성능 컴퓨팅 플랫폼을 공유함으로써 차량 기능의 확장성이 증대될 수 있어 SDV를 구현하는 기본이 된다.

도메인 E/E 아키텍처는 중앙 게이트웨이를 중심으로 기능별 통합
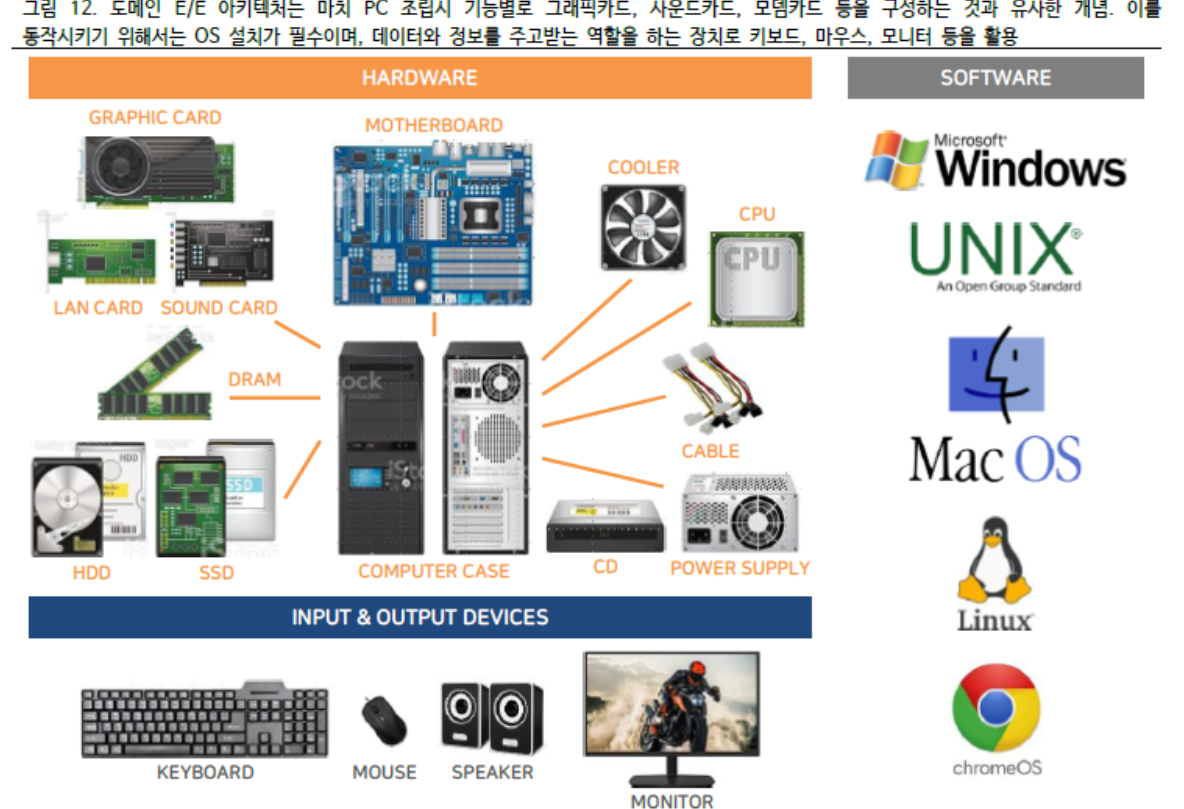
도메인 E/E 아키텍처는 중앙 게이트웨이(중앙 어플리케이션 서버)를 중심으로 EV/파워트레인, 바디/섀시, ADAS 및 자율주행, 인포테인먼트, 커넥티비티 등 주요 5가지 도메인을 연결하는 구조가 핵심이다. 마치 우리가 데스크탑 PC를 조립할 때 CPU가 탑재된 마더보드에 기능별로 그래픽카드, 사운드카드, 모뎀카드 등을 구성하는 것과 유사하다고 볼 수 있다.
도메인 방식은 제어 장치와 센서가 DCU에 가깝게 배치되고, 더 많은 장치와 센서를 처리하기 위한 추가 제어 모듈이 탑재될 경우 확장도 가능하다. 그러나 제어 장치와 센서가 차량의 여러 위치에 산포해 있기 때문에 와이어링 하네스 연결에 복잡도는 여전히 주요한 문제가 된다.
존 E/E 아키텍처가 궁극적으로 가야 할 방향
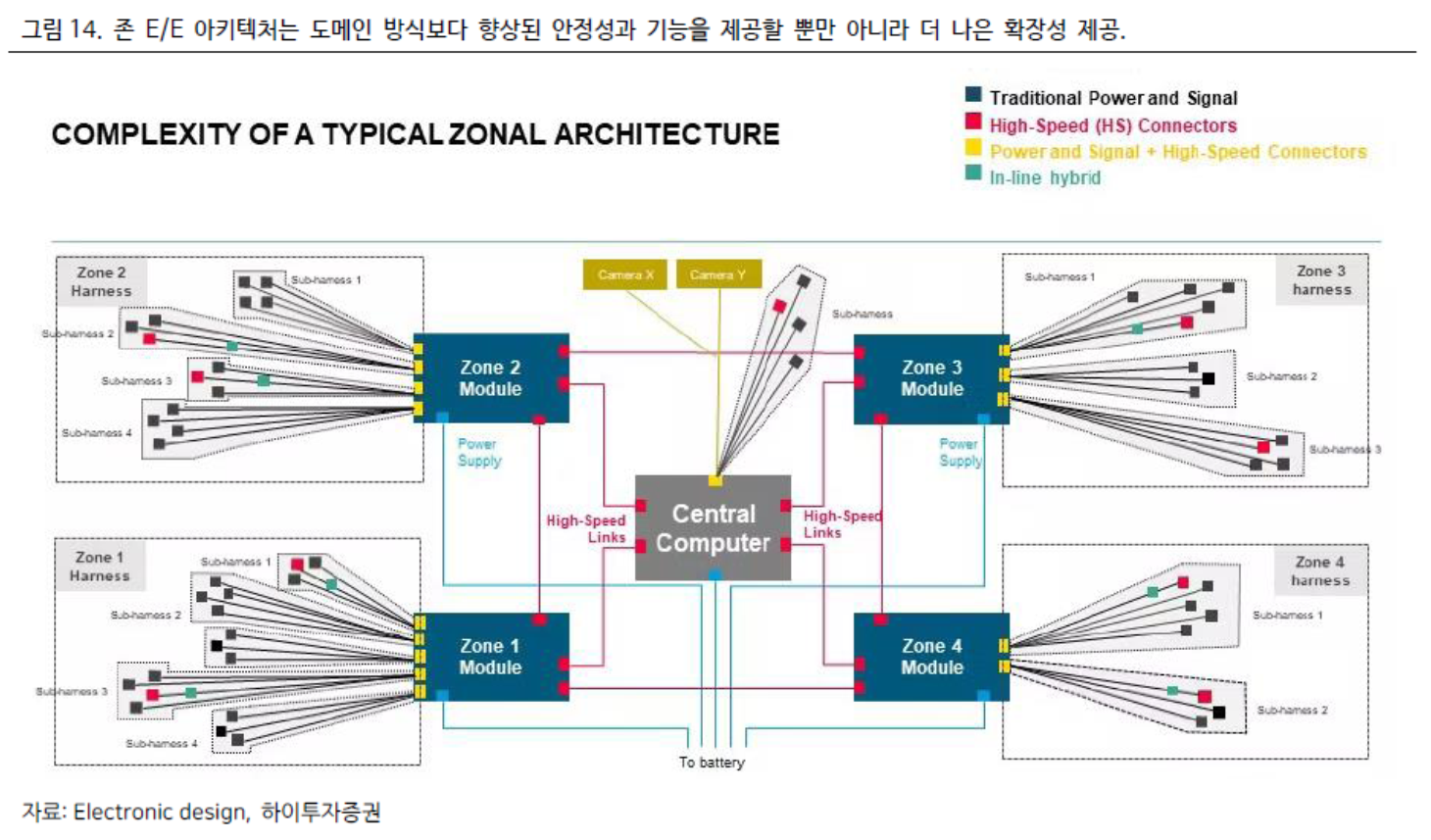
존 E/E 아키텍처는 도메인 방식보다 향상된 안정성과 기능을 제공할 뿐만 아니라 더 나은 확장성을 갖추고 있다. 존 방식은 기능에 따라 분할되지 않고 물리적 근접성에 따라 구역으로 나뉘어 고속의 백본 네트워크로 연결된 조날(Zonal) 게이트웨이와 차량용 컴퓨팅 플랫폼으로 구성된다.
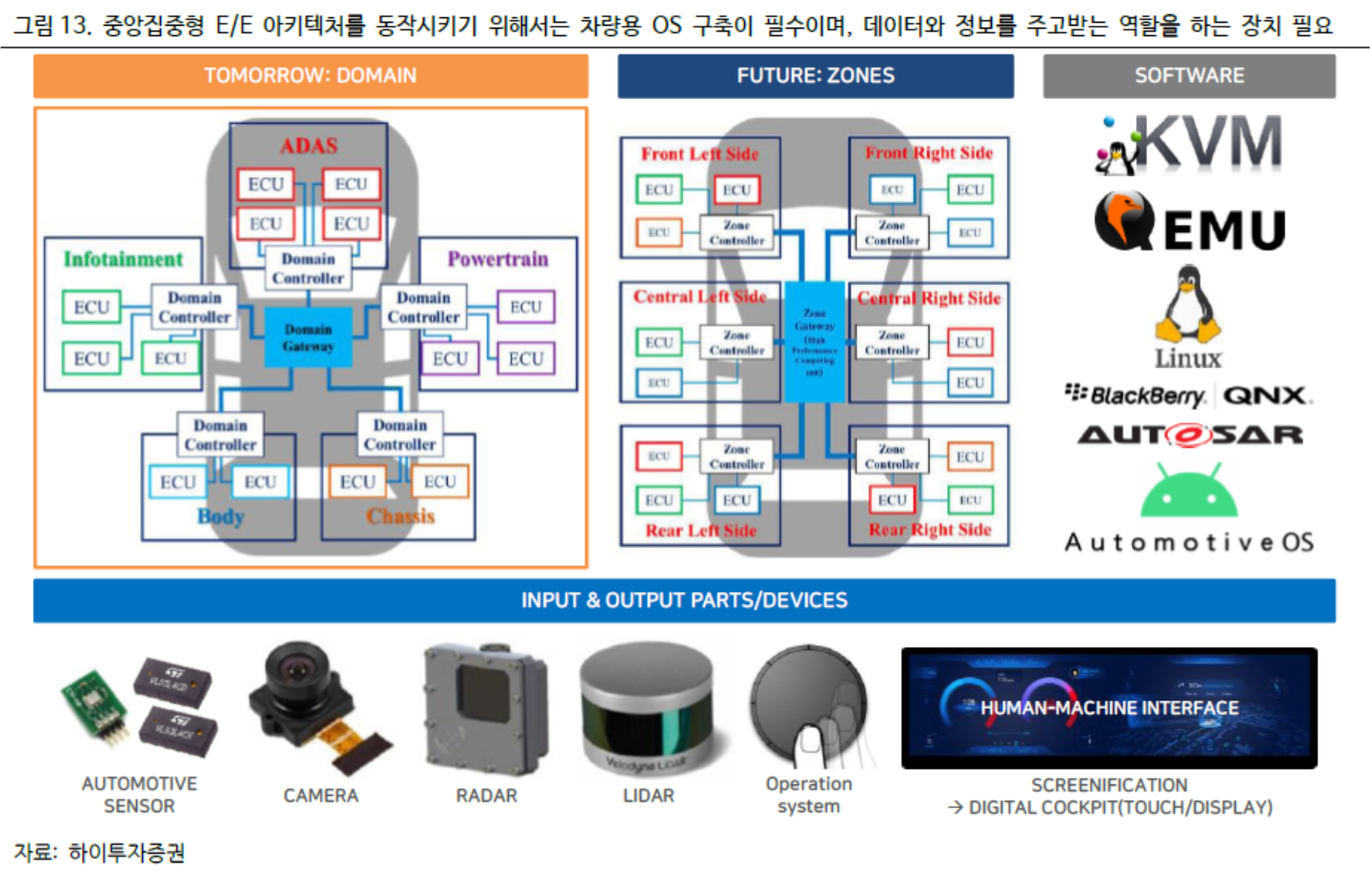
조날 게이트웨이는 기존의 ECU와는 달리 제어기능을 구현하기보다는 단지 주변 센서와 액추에이터와의 인터페이스, 주변기기들에 대한 배전, 퓨즈들을 탑재한 정션 박스, 오토모티브 이더넷(접근 제어 주소를 가지고 상호간 데이터를 주고 받을 수 있도록 하는 근거리 통신망) 스위치 등의 역할을 수행한다.
이 때 조날 게이트웨이들은 오토모티브 이더넷을 통해 중앙집중형 컴퓨팅 플랫폼과 연결된다. 과거 ECU에서 수행되던 제어기능이 컴퓨팅 플랫폼에서 소프트웨어로 구현되는 것이다.
중앙집중형 E/E 아키텍처 변화에 따른 하드웨어-소프트웨어 디커플링 현상으로 자동차 산업 공급망에 큰 변화 야기
차량 제조 관점에서 조날 E/E 아키텍처의 가장 큰 장점은 통신, 배선/배전의 단순화에 있다. 또한 I/O 장치, 통신, 배선/배전 등의 낮은 수준 하드웨어의 기능과 구조를 조날 게이트웨이를 통해 추상화하고, 차량제어 연산을 수행하는 컴퓨터와 분리시킬 수 있다는 점이다.
이를 하드웨어-소프트웨어 디커플링이라고 한다. IT 산업에서는 Apple의 iOS 버전이 계속적으로 업그레이드 되더라도 다양한 제품(하드웨어)과 여러 세대에 걸쳐 상향, 하향 호환이 가능하다는 것이 대표적인 예이다.

하드웨어-소프트웨어 디커플링은 향후 자동차 산업의 공급망의 큰 변화를 불러일으킬 수 있다. 기존 Tier-1을 포함한 많은 부품사들이 ECU를 통해 발생시켰던 소프트웨어의 가치창출이 완성차 제조사 혹은 소프트웨어 개발업체에 의해 잠식될 수 있기 때문이다. 전통적인 하드웨어 부품사들은 확실한 체질 변화를 통해 필연적으로 소프트웨어 개발사들과 경쟁하지 않으면 점차 도태될 가능성이 높다.
출처: 하이투자증권, Bosch, Roland Berger, NXP, Tesla
뜨리스땅
https://tristanchoi.tistory.com/616
자동차 기술 탐구 - SDV란? (1) SDV의 정의 및 의미
스마트카의 핵심은 연결성, 자율주행 그리고 이를 구현하기 위한 전동화 스마트카는 사람과 사물의 이동성을 제공하는 이동수단이라는 전통적인 본질에 IT기술을 융합시켜 각종 편의 기능과 안
tristanchoi.tistory.com
https://tristanchoi.tistory.com/617
자동차 기술 탐구 - SDV란? (2) 중앙집중형 E/E 아키텍처
수십 개의 ECU가 복잡하게 연결된 구조의 분산형 E/E 아키텍처에서는 SDV 구현 불가능 전통적 차량의 E/E 아키텍처는 게이트웨이(서로 다른 근거리 네트워크간 연결 지점)를 중심으로 기능에 따라
tristanchoi.tistory.com
https://www.youtube.com/watch?v=M6XHP8pJ8Js
'자동차 산업' 카테고리의 다른 글
| 자동차 기술 탐구 - SDV란? (4) 통합형 OS의 중요성 (0) | 2024.03.05 |
|---|---|
| 자동차 기술 탐구 - SDV란? (3) 자동차의 두되이자 심장이될 AP (0) | 2024.03.04 |
| 자동차 기술 탐구 - SDV란? (1) SDV의 정의 및 의미 (0) | 2024.03.02 |
| 엘앤에프 - 24Q4 update: 재고 리스크의 절반쯤 해소 (1) | 2024.02.03 |
| CES 2024에서 엿본 미래 - 모빌리티 (1) | 2024.01.26 |




댓글