1. 산업용로봇
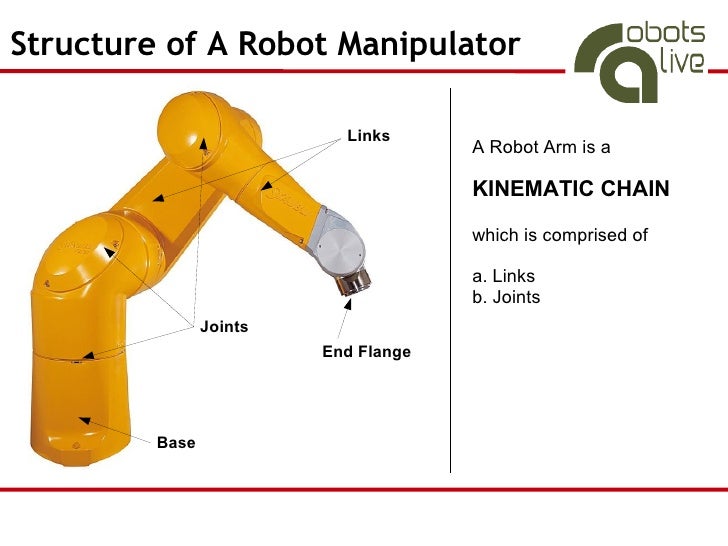
“산업용 로봇”이라고 부르는 것은 보통 관절 형태의 로봇암 (Robot Arm)을 의미하며 학술적으로는 로봇 조작기 (Robot Manipulator)라고 한다. 로봇 조작기는 여러 개의 관절을 링크로 연쇄적으로 연결한 구조물이며, 이러한 이유로 다관절 로봇이라고 부르기도 한다. 링크는 구조적으로 관절을 연결하고 있는 구조물이며 특별한 움직임을 담당하지는 않으며 관절의 회전을 다른 링크에 전달하기 위한 역할로써 사용된다.
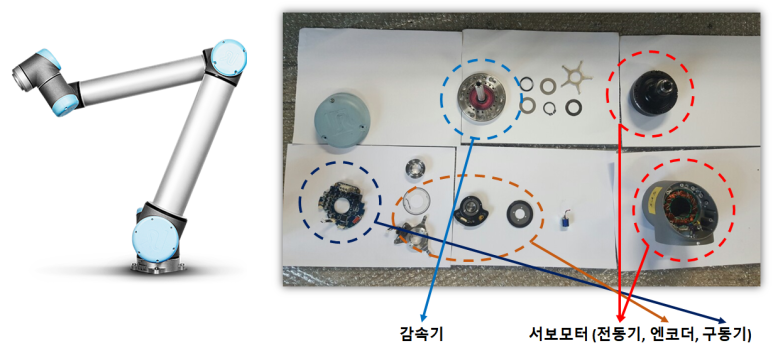
로봇팔의 관절 구조는 “감속기”라는 부품과 “서보모터”라는 부품으로 이루어져 있다. 감속기는 서보모터의 빠르고 낮은 힘의 회전을 느리고 높은 힘의 회전으로 변환해주는 동력 변환 장치이다. 모터는 빠르게 회전하지만 모터에 연결된 링크와 같은 부품들을 회전시키기에는 힘이 부족하다. 따라서 로봇이 움직이기 위해서는 모터의 속도를 늦춰주는 대신 힘을 키워주는 변환이 필요하며 이 역할을 감속기라는 부품이 담당한다.
서보모터는 특정 명령(위치, 속도, 힘)을 추종하기 위한 전반적 시스템 전부를 의미하며,
- 일반적으로 전자기력에 의하여 전기 에너지를 운동 에너지로 바꿔주는 전동기(Motor),
- 회전축의 회전 각도를 계측하는 센서인 인코더(Encoder),
- 그리고 명령을 받아 모터의 값이 명령받은 값을 추종하도록 제어를 해주는 구동기(Driver) 3개의 부품이 1개의 서보모터 모듈을 구성하고 있다.
로봇팔의 움직임은 관절이 어떻게 회전하는가에 따라 결정이 되며 결국 서보모터가 어떻게 회전하는가에 따라 움직임이 결정된다고 볼 수 있다. 그리고 이 서보모터가 어떻게 움직여야 하는지를 계산해주는 역할을 하는 부품을 “모션 제어기”라고 한다. 모션 제어기는 로봇이 적절하게 움직일 수 있도록 실시간으로 로봇의 관절이 가져야 할 값들을 계산한 뒤 해당 값들을 서보모터가 추종하도록 서보모터에 전송하는 일종의 계산기라고 볼 수 있다.
실시간으로 계산된 값들을 서보모터에 전달하게 되면 서보모터의 구동기가 해당 명령 값을 추종하도록 전동기를 제어하며 로봇이 구동하게 된다. Motor, Encoder, Driver의 3가지 부품이 없으면 로봇팔에 대한 성립이 불가능하기 때문에 이것들을 로봇팔의 핵심 3대 부품이라고 한다.

2. 협동로봇
협동로봇의 경우에도 산업용 로봇의 관절에 사용된 감속기 및 서보모터 등이 동일하게 존재한다. 다만 산업용 로봇의 관절이 감속기와 서보모터(모듈)로 구성되어 있는 반면, 협동 로봇의 관절은 전동기, 인코더, 구동기와 같은 감속기와 서보모터의 부분적 요소들이 각각의 독립적인 부품으로 존재하며, 이러한 부품들 모두를 합쳐 관절 모듈을 구성하고 있습다. 구조적으로는 산업용로봇과 협동로봇은 동일한 구조라고 볼 수 있다.
그러나, 협동로봇은 산업용로봇과 모션 제어기가 다르며, 정확히는 모션 제어기가 서보모터를 제어하는 방법이 다르다고 할 수 있다. 서보모터는 특정 명령(위치, 속도, 힘)을 추종하며 움직이는 부품이며, 로봇이 적절하게 움직일 수 있는 값을 모션 제어기라는 부품이 실시간으로 계산하여 서보모터에 명령을 내리면, 서보모터가 해당 값을 추종하며 회전하여 결과적으로 로봇이 움직일 수 있게 된다.
여기서 모션 제어기는 서보모터에 여러 가지 방식으로 명령을 내릴 수 있습니다. 서보모터가 특정 위치(각도)를 추종하도록 할 수도 있고, 특정 힘(토크)를 추정하게 할 수도 있습니다.
모션제어기는 로봇이 적절하게 움직이게 하기 위하여 서보모터가 추종해야 하는 값을 실시간으로 계산한 뒤 해당 값을 서보모터에 전송하는 일종의 계산기이기 때문이다.
3. 산업용로봇과 협동로봇의 차이: 제어 방식의 차이
3.1. 모션제어기의 작동 방식
일반적으로 로봇팔의 모션제어기는 서보모터에 2가지 종류의 명령을 보낸다.
첫번째는 위치 명령이다.
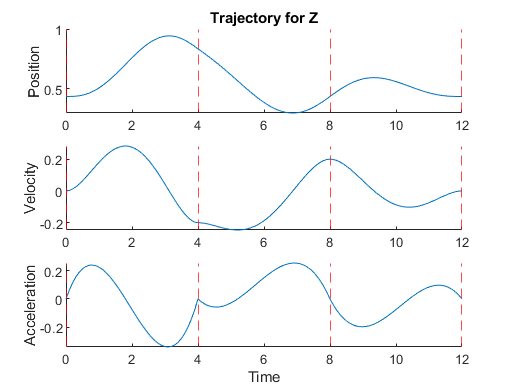
모션제어기는 사용자의 의도에 따라 로봇이 적절하게 움직이도록 실시간으로 로봇의 각 관절이 어떠한 각도가 되어야 하는지를 계산할 수 있다. 특정 시점과 해당 시점에서의 각도(값)을 모으게 되면 아래와 같은 그래프로 표현을 할 수 있으며, 이를 로봇의 경로 (Trajectory) 라고 한다. 그리고 이러한 값들을 계산하는 작업을 모션제어기의 경로생성 (Trajectory Generation) 이라고 한다.
두번째는 기동 제어다.
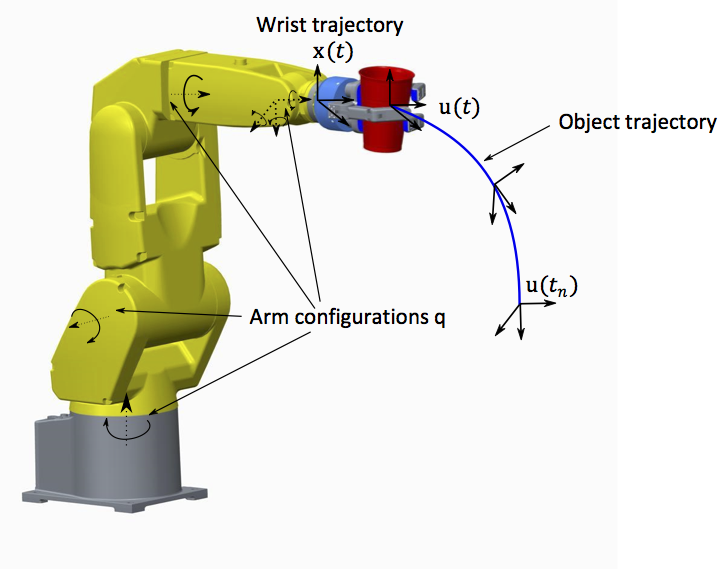
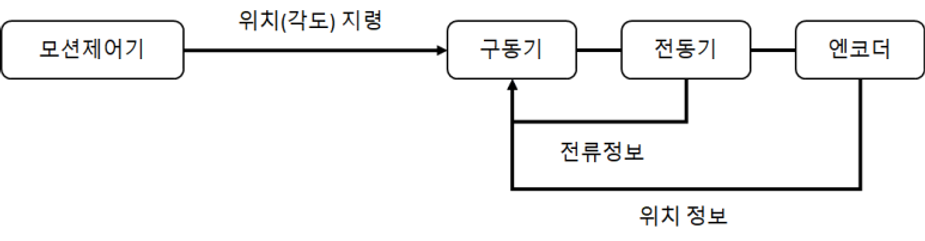
위 그림과 같이 매 순간순간 모션제어기가 로봇이 움직이기 위한 각도를 계산하고 서보모터가 해당 위치를 추종하도록 값들을 보내게 되면 서보모터의 구동기가 해당 값을 받아 모터의 각도가 해당 각도를 추종하도록 제어하게 되며, 결과적으로 해당 순간에 서보모터의 각도는 모션제어기가 전송한 각도에 위치하게 된다. 그리고 해당 각도대로 로봇이 움직이게 됩니다. 이것이 로봇암이 움직이게 되는 가장 기본적인 원리다.
이러한 제어 구조를 Semi-closed loop 제어 구조라고 하며, 이러한 구조는 로봇암 뿐만이 아니라 3D 프린터나 CNC 가공기, 각종 산업용 설비 등에서 매우 많이 사용하는 제어 구조이다.
3.2. 모션제어의 차이: 경로상의 위치와 각도 vs. 토크
만일 위와 같이 계획된 경로에 따라서 로봇이 움직이는 도중 무엇인가에 충돌한다면 어떻게 될까? 충돌을 알기 위해서는 모션제어기가 모터의 각도나 전류 등을 받아야 하지만, 이를 받지 않고 단순히 로봇이 경로대로 움직이기 위한 각도 값들 만을 계산하여 서보모터에 전송하기 때문에 모션제어기는 이를 알 방법이 없다.
서보모터의 구동기는 모터에 연결된 엔코더나 전류 정보등을 통하여 충돌이 발생했는지 알 수도 있긴 하지만, 구동기의 주요 목적은 입력받은 값을 추종하도록 모터를 제어하는 것이지 충돌을 감지하는 것은 아니다. 따라서, 모션제어기는 충돌과 관계없이 서보모터가 충돌 이후 시점에 유지해야 하는 각도를 계속 서보모터에 전송할 것이고 서보모터는 해당 값을 추종하기 위하여 계속 회전하려 할 것이다.
만일, 로봇의 힘이 충분하다면 충돌한 물체를 밀고 로봇이 원래 움직여야 하는 경로대로 움직일 것이고, 로봇의 힘이 불충분하다면 충돌 이후 과부하 등이 걸리게 된다. 이러한 경우 충돌 대상의 파손 등의 위험 요소가 발생할 수 있기 때문에 원천적으로 로봇이 무엇인가에 충돌하지 못하도록 로봇을 움직이도록 하는 것이 중요하다.
이는 로봇이 정지해 있는 상황에서 무엇인가가 로봇에 충돌했을 경우도 마찬가지이다. 로봇의 경로가 변하지 않는 경우, 즉 로봇이 정지해 있는 경우에도 모션제어기는 해당 값들을 계속 서보모터에 전송하게 되며, 서보모터는 해당 값을 계속 추종하기 위한 제어를 수행한다. 만일 로봇이 정지되어 있는 경우 사람이 로봇을 민다면 어떤 일이 일어날까?
만일 사람이 로봇을 미는 힘이 로봇의 힘보다 셀 경우 로봇은 밀릴 것이며, 사람이 미는 행위를 중지할 경우 로봇은 원래의 위치로 돌아올 것이다. 만일 사람의 미는 힘이 로봇의 힘보다 약할 경우 당연히 로봇은 꿈쩍도 하지 않고 움직이지 않을 것이다. 일반적으로 로봇의 힘이 사람의 힘보다 더 세기 때문에 위와 같은 상황에서 보통은 사람은 로봇을 움직이게 할 수 없다.
위와 같은 상황이 일반적안 산업용 로봇이 움직이는 방식이며, 산업용 로봇이 무엇인과 충돌했을 때 일어날 수 있는 반응이다. 따라서 만일 충돌 대상이 사람이라면 상해의 위험 등이 발생할 수 있기 때문에 일반적으로 로봇과 사람을 같은 공간에서 작업하도록 배치하지 않는다. 즉, 로봇이 사람과 같은 공간에서 상호작용할 기능이 없는 것이 아니라, 로봇이 사람과 같은 공간에서 상호작용을 할 경우 사람에게 위협이 될 수 있는 요소가 있기 때문에 일부로 그렇게 사용을 하지 않는다는 표현이 옳다.
그렇다면 협동로봇은 어떻게 작동할까? 협동로봇도 일반적인 산업용 로봇과 같이 모션제어기가 경로를 계산하는 것 까지는 같다. 다만, 협동로봇과 같은 경우 모션제어기가 해당 경로를 유지하기 위해서 서보모터에 위치(각도)값을 전송하는 것이 아니라 힘(토크) 값을 전송한다. 즉, 해당 경로를 추종하기 위해서 힘을 얼마만큼 주고 있어야 하는지를 계산하게 되고, 해당 힘(토크) 값을 서보모터에 전송하게 된다. 그리고 서보모터의 구동기는 입력받은 힘(토크)를 추종하도록 모터를 제어하게 된다. 이러한 구조를 Full-closed loop 제어라고 한다. 로봇이 특정 경로를 따라 움직이는 것은 동일하지만 모션제어기가 해당 경로대로 로봇이 움직이기 위한 위치(각도) 값을 계산하는 것이 아니라 힘(토크) 값을 계산하게 되는 것이다.
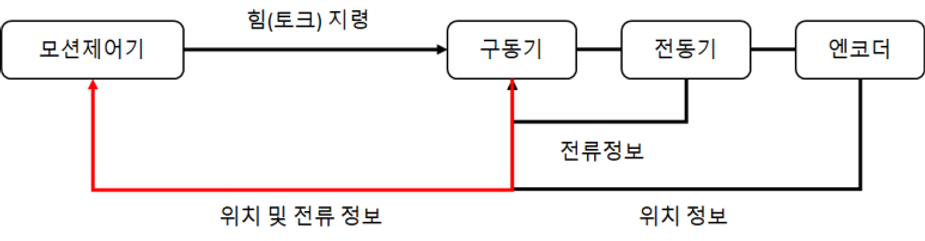
만일 위와 같은 경우 로봇이 움직이는 동안 무엇인가에 충돌하거나, 로봇이 멈추어 있는 동안 무엇인가가 로봇을 밀 경우 모션제어기는 해당 상황을 감지할 수 있다. 왜냐하면 모션제어기가 서보모터로 부터 현재 모터의 각도 등의 정보를 받을 수 있기 때문이다.
만일 충돌 등의 상황을 모션제어기가 감지하였을 경우 모션제어기는 두가지 선택을 할 수 있다.
첫번째 방법은 충돌의 감지 여부와 관계없이 기존에 모션제어기가 계산한 경로대로 로봇이 움직일 수 있도록 제어를 하는 것이다. 즉, 충돌을 이겨내고 해당 경로를 유지하기 위한 힘을 계산해서 서보모터에 전송을 하는 것이다. 이렇게 작동할 경우 로봇은 앞서 설명한 방식의 일반적 산업용 로봇이 충돌 등의 상황에 직면하였을 경우와 완전히 동일하게 작동할 것이다.
실제로 일부 산업용 로봇은 앞서 설명한 Semi-closed loop 제어 구조를 사용하지 않고 Full-closed loop 제어 구조를 사용하면서 계산된 위치를 추종하도록 제어하기도 한다. 이렇게 제어할 경우 보다 최적화된 로봇의 움직임을 구현할 수 있기 때문이다.
두번째 방법은 충돌을 감지하였을 경우 경로를 따라가지 않고 멈추도록 힘을 계산하여 서보모터에 전송하는 것이다. 이런 방법을 사용할 경우 로봇이 충돌을 할 경우 로봇을 멈추게 할 수 있게 된다. 이와 유사하게 로봇이 정지한 상태에서 사람이 로봇을 밀 경우 이를 감지한 뒤 로봇이 해당 위치를 유지하기 위한 힘을 계산하여 서보모터에 전송하는 것이 아니라, 사람에 밀리도록, 정확히는 사람의 힘에 의해 로봇이 밀려주는 것과 같이 보이도록 힘을 계산하여 서모보터에 전송할 수도 있다.
이런 방법을 사람이 정지된 로봇을 밀 경우 로봇이 사람의 힘에 의해 밀려 나가는것과 같이 움직여 줄 수 있게 할 수 있게 된다. 이러한 제어 방법을 외력에 순응해 움직여 준다고 하여 순응제어(Compliant Control) 이라고 부르기도 하며, 마치 로봇이 특정 물리적 모델을 바탕으로 움직여 준다고 하여 임피던스 제어(Impedance Control) 이라고 부르기도 합니다. 현존하는 대부분의 협동로봇은 이러한 제어 원리를 사용하여 충돌 감지나 직접 교시 (핸드 티칭) 등의 구현을 구현하게 된다.
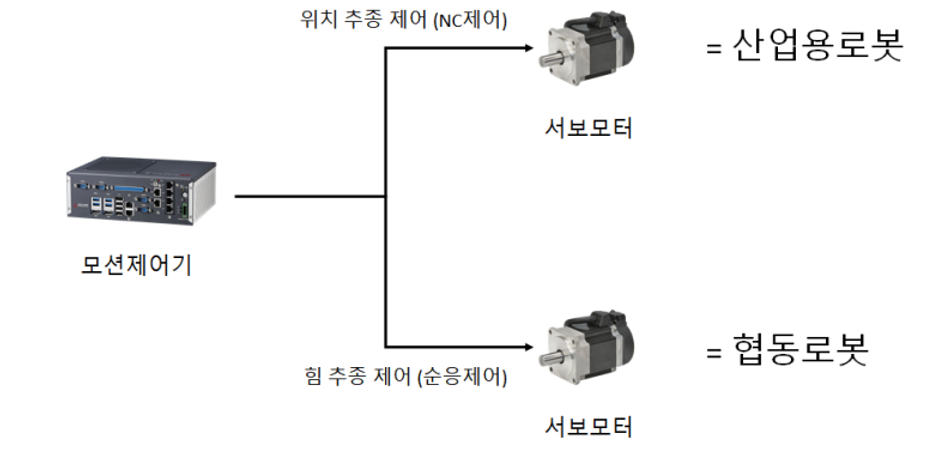
정리하게 되면 산업용 로봇은 Semi-closed loop 구조에 의한 위치 추종 제어나 Full-closed loop 구조에 의한 위치 추종 제어를 사용하게 되며, 충돌 등의 상황이 발생하였을 경우 계획된 경로대로 움직이기 위한 움직임을 하게 된다.
따라서, 사람이 로봇에 충돌하였을 경우 안전 문제가 발생할 수 있으며, 이러한 이유로 일반적으로 사람과 격리된 공간에서 작동하도록 사용한다. 하지만, 이는 전적으로 사용자의 선택일 뿐 로봇이 사람과 물리적 상호작용을 할 능력이 없다는 것을 의미하지는 않는다.
협동로봇은 Full-closed loop 구조에 의한 순응제어를 사용하게 되며, 충돌 등의 상황 발생시 정지하거나, 사람이 로봇을 밀 경우 사람의 힘에 의하여 밀려주도록 움직일 수 있다. 즉, 물리적 상호 작용을 한다고 볼 수 있다. 그리고, 일반적 산업용 로봇과 비교하여 더 안전할 수 있기 때문에 사람과 같은 공간에서 작업을 하도록 사용한다.
3.3. 안전규정과 안전표준의 차이
기본적으로 협동로봇은 산업용 로봇의 한 종류이기 떄문에 협동로봇 또한 산업용 로봇의 안전 표준을 준수해야 한다.
산업용 로봇의 안전 요구사항을 담고 있는 ISO 10218은 협동로봇에서도 가장 중요한 표준이라 할 수 있으며, 안전 관련 제어시스템은 ISO 13489을 토대로 설계하고 성능레벨을 평가한다다. 또한, 위험성 평가를 수행할 경우에는 ISO 12100을 참고하게 된다
ISO 10218의 부속조항인 ISO 10218-1에서는 협동로봇의 정의 또한 찾을 수 있다.
이 표준에서는 4가지 종류의 협동운전(collaborative operation)을 소개하는데, 이러한 협동운전이 가능하도록 설계된 로봇을 협동로봇이라 부른다.
첫번째 방식은 safety-rated monitored stop.
작업영역은 감시되며, 사람이 로봇 작업영역에 진입하려 할 경우 로봇은 즉각 정지한다. 즉, 작업영역에 사람이 없을 경우에만, 로봇은 일반 산업용 로봇(non-collaborative robot) 처럼 동작한다. 이 방식에서는 사람과 로봇이 같은 공간에서 동시에 움직일 수 없다.
두번째 방식은 hand guiding
사람이 수작업 장치(hand-operated device)를 사용하여 로봇을 이동시킨다. 사람이 로봇을 직접 제어 한다는 점에서 수동 조작과 유사하다. 위의 두 가지 또한 협동운전의 방식으로 소개되긴 하지만, 우리가 생각하는 협동로봇과 조금 상이할 것이다. 산업 현장에서 실질적으로 유용하게 사용될 수 있는 협동운전은 위 두 가지 방식이다.
세번째 방식은 speed and separation monitoring
로봇과 사람 사이의 거리를 모니터링하며, 안전거리를 확보한다. 사람이 로봇에 가까이 다가올 경우 로봇의 속도는 줄어들며, 일정 간격 이내로 접근할 경우 로봇은 정지하게 된다. 사람이 로봇 작업 영역에 접근했는지 파악하기 위하여 안전 스캐너 등 외부 장치를 추가로 사용한다.
네번째 방식은 power and force limiting
현재 협동로봇이라는 이름으로 시중에 판매되는 제품 대부분은 마지막 방식인 power and force limiting 을 적용한다. 일정 값의 동력(power) 또는 힘(force)을 검지되면 로봇은 즉각 정지함으로써 사람이 상해를 입지 않도록 보호한다. 로봇은 힘, 동력, 속도 등을 제한하는 안전기능을 보유하고 있으며, 이러한 기능이 상시 활성화되어 있다. 그 결과, 안전펜스와 같은 별도의 안전 장치가 없더라도 사람은 로봇과 같은 공간에서 안전하게 작업할 수 있다.
3.4. 협동로봇에서 새롭게 정의된 기술 사양
ISO 10218은 산업용 로봇의 대표적인 안전 표준이지만, 기존의 일반적인(traditional) 산업용 로봇을 기준으로 작성되었다. 그러다보니 일부 내용은 협동로봇의 특성과 맞지 않다.
예를 들어, 기존 산업용 로봇은 활성화 장치(enabling device)가 필수적이다. 로봇을 수동으로 조작할 때, 활성화 장치의 버튼을 살짝 눌러야 로봇을 동작시킬 수 있으며, 꽉 누르면 로봇은 정지한다. 로봇이 갑자기 움직일 경우, 사람이 깜짝 놀라 버튼을 꽉 누르게 된다는 인간 공학적인 설계가 반영되어 있으며, 이를 통해 안전을 확보한다는 개념이다.
하지만 동력과 힘을 제한하는 협동로봇의 경우, 로봇의 갑작스런 움직임으로 인해 사람과 부딪치더라도 충돌을 검지하여 정지할 것이므로, 활성화 장치가 없더라도 안전을 확보할 수 있다.
또한, 동력 및 힘을 제한하는 협동로봇의 경우, 동력과 힘에 대한 안전 파라미터는 얼마나 큰 값으로 설정해야 하는지에 대한 정보도 필요하다. 이러한 필요성이 대두되면서 전세계 로봇 제조사 및 연구기관이 ISO에 모여 위원회를 결성하고, 협동로봇의 안전에 대한 표준을 작성하기로 했다. 이에 수년간 논의를 거쳐 2016년 2월, 협동로봇 기술사양 ISO/TS 15066(https://www.iso.org/standard/62996.html)이 배포되었다.
이 기술문서에서는 협동로봇 관련 개념 및 안전 요구사항을 설명하고, 부록으로 신체 부위에 따른 압력 및 힘 제한치를 제공한다. 이 문서를 활용하여 협동로봇시스템의 위험성을 평가하고 로봇을 안전하게 사용하기 위한 파라미터를 찾아낼 수 있다.
흥미로운 점은 아직 정식 표준은 아니다. 협동로봇은 아직 성숙하지 않은(immature) 새로운 분야이기 때문에 실제 사례나 연구 결과가 부족한 상황이며, 일부 내용은 추가 논의가 필요하다. 하지만 협동로봇이 수많은 현장에서 적용되고 있으며, 이 분야에 대한 연구 또한 활발하게 진행되고 있는 만큼, 다음 개정판에서는 정식 표준으로 인정받을 수 있을 것으로 예상된다.
출처: 민트로봇, 만인을 위한 산업용로봇
뜨리스땅
https://tristanchoi.tistory.com/408
로봇 산업 탐구: 로봇 부품에도 주목해야 함
1. 5가지 부품으로 완성되는 로봇 부품 제조사의 공급 체인은 2가지다. 1) 완제품 제조사에 판매, 2) 앤드유저 직접 판매다. 일부 로봇완제품 제조사는 자체적으로 부품을 생산·조달하기도 한다.
tristanchoi.tistory.com
'로보틱스' 카테고리의 다른 글
| 협동로봇 특허 동향 (0) | 2024.02.01 |
|---|---|
| 협동로봇 메카니즘 이론(feat. by Universal Robotics) (0) | 2024.01.30 |
| 의료용 로봇 - 국내 수술로봇의 역사와 현재(feat. by 고영테크놀로지) (0) | 2024.01.27 |
| CES 2024에서 엿본 미래 - 로봇 (0) | 2024.01.26 |
| 두산로보틱스 - 투자 가치가 있을까? (0) | 2024.01.25 |


댓글