변화의 흐름
최근 2년은 자동차 산업의 많은 변화가 일어난 해였다. L4 이상의 로보택시 비즈니스를 영위하던 Argo AI 가 사업 중단을 선언했고, Tesla 는 기존의 Camera 만을 사용해서 자율주행을 추구하겠다는 목표를 수정, 4D Imaging Radar 를 탑재할 것으로 보인다. 변화의 흐름은 지난 1 월 CES에서도 찾아볼 수 있었다.

모빌리티 업체들이 제시한 미래 먹거리는 명확했다. 바로 SDV 였다. 현대자동차는 2025 년까지 기존 내연기관 차량 라인업을 포함하여 전 차종을 SDV 로 전환하겠다고 발표했다. Tier 1 부품 업체와 같은 기존 자동차 시장의 플레이어뿐 아니라, 빅테크 업체들이 제시한 SDV 로드맵은 명확하고 구체적이었다.
SDV 구현에 있어 부품 업체의 입지는 상승
Bosch 는 자회사 ETAS 를 통해 SDV 구축을 위한 통합 솔루션 역량을 내재화하겠다고 밝혔고 Continental 은 CAEdge (Continental Automotive Edge Framework, 모듈식 소프트웨어 프레임워크)를 고객들에게 제공할 계획이다.
Amazon (AWS), Microsoft (Azure)는 보유하고 있는 클라우드와 차량을 연결하거나, 주행에 필요한 다양한 데이터를 제공할 수 있으며, 이를 통해 차량 인포테인먼트 시스템에 다양한 서비스의 결합도 가능한 솔루션을 제시했다.
OTA를 통한 차량-클라우드의 연결, 즉 소프트웨어 업데이트가 SDV의 핵심
SDV는 용어에서 알 수 있듯이 소프트웨어로 정의된 차량을 뜻한다. 즉 차량의 인포테인먼트, 바디/섀시, ADAS와 같은 기능을 다양한 소프트웨어를 통해 업데이트(OTA)를 할 수 있는 것을 말한다. 인포테인먼트의 경우를 예로 들어 보자.
차량 계기판에 표시되는 여러가지 UX/UI를 변경하기 위해 차량은 새로운 데이터를 클라우드로부터 전송받게 된다. 이 과정에서 차량의 소프트웨어는 차량-클라우드를 이어주는 역할을 수행한다.
ADAS도 마찬가지이다. 안전 경보 시스템이 작동하지 않거나, 차선 유지 기능에 오류가 있다면 새로운 패치 데이터를 클라우드로부터 전송받아야 한다. ADAS의 수준이 자율주행으로 발전하고, 차량 내부 인포테인먼트 시스템의 다양화에 따라 차량-클라우드에서 일어나는 OTA 데이터는 더욱 증가할 것이다. 마찬가지로 이를 제어하고 통제하는 소프트웨어의 중요성 또한 높아질 것은 분명하다.
차량의 기능을 제어하는 OS는 서로 다르게
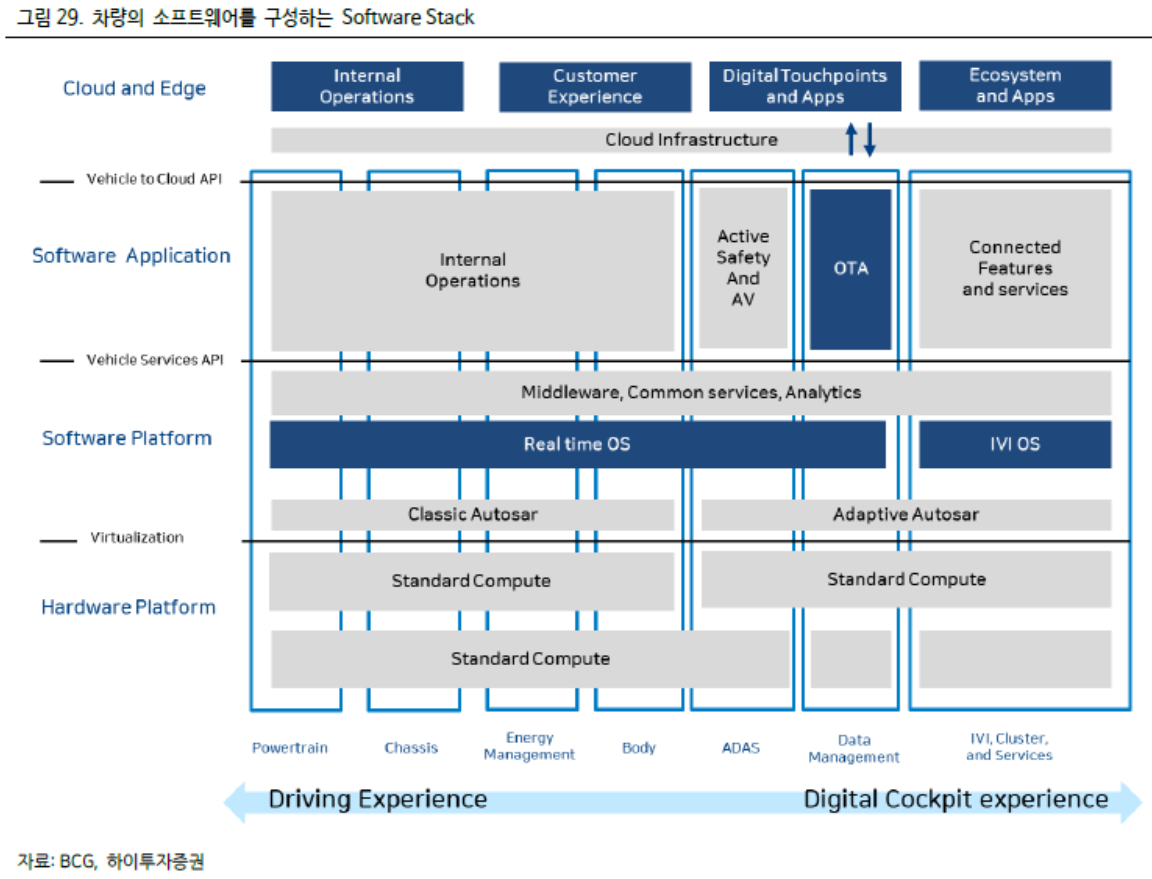
이와 같이 차량 내외부를 연결하는 소프트웨어의 핵심은 ADAS, 바디/섀시, 인포테인먼트와 같은 기능을 제어하는 다양한 OS다. 차량을 구성하는 각 기능은 서로 다른 특징을 가진다.
예를 들면 ADAS의 경우 Smart Cruise(반자율주행), 후측방 경고 시스템이 있으며, 실시간 제어가 무엇보다 중요하다. 1~2초라도 시스템의 Latency가 발생하면 큰 사고로 이어질 수 있기 때문이다.
반면 인포테인먼트 OS는 기본적인 디바이스 미러링부터 다양한 차량 내부 편의 기능을 제어하기 때문에 호환성이 중요하다. 즉 다양한 기능을 제어하기 위해 조건에 맞는 서로 다른 차량용 OS를 동시에 작동시키는 것이 필요하다.
신속한 제어가 중요한 ADAS, 자율주행에는 RTOS(Real Time Operating System 실시간 운영 체제)의 방식으로 구성하여 보다 신속하게 데이터를 처리하고 관련 기능을 제어한다. 인포테인먼트의 경우 범용성을 가진 오픈 플랫폼을 기반으로 완성차 OEM이 자체적으로 OS를 개발하거나, 넓은 생태계를 구축하고 있는 외부 OS를 사용하기도 한다.
테슬라는 인포테인먼트, 자율주행 등을 동작시키는 자체 OS를 대부분 Linux 기반으로 구현
테슬라는 현재 완성차 OEM 중에서 가장 높은 수준의 SDV를 구현하고 있다. 현재 인포테인먼트 영역에서 제한적으로 소프트웨어 업데이트 기능을 제공하고 있는 타 업체와 달리 Tesla는 Autopilot, FSD, 바디/섀시 등 전 영역에 걸쳐 정기적인 업데이트를 실시하고 있다.
이러한 Tesla는 인포테인먼트, 자율주행 등을 동작시키는 자체 OS를 대부분 Linux 기반으로 구현하고 있다. Linux는 Unix기반 임베디드 시스템 개발 오픈 소스 운영체제로서 컴퓨터와 같은 임베디드 시스템부터 클라우드 서버 영역까지 활용 가능하며 오랜 기간 업데이트를 통해 다양한 버전이 존재한다.
Tesla는 인포테인먼트의 경우 Ubuntu 리눅스를 사용하고 있다. Ubuntu 리눅스는 다른 리눅스 배포판보다 모바일 기기 및 차량과 같은 엣지 디바이스에 최적화가 되어있다. Autopilot, FSD의 경우 어떤 배포판을 사용하는지 공개되지는 않았지만 리눅스 기반의 Embedded Linux를 사용하는 것으로 추정된다.
하이파이저 기반 멀티 OS 구현은 완성차 OEM들이 선택할수 있는 옵션
그러나 Tesla와 같이 모든 OS를 리눅스 기반으로 구축한다면 해킹에 취약할 수 있다는 우려의 시각도 있다.
테슬라 차량의 해킹 사례는 종종 찾아볼 수있다. 다행히 원격으로 창문을 열거나 문을 여닫는 정도가 대부분이었지만, 일부 해커들은 원격으로 주행을 조작하는 것이 불가능하지 않다는 것을 보여준 사례도 있었다.
테슬라는 인포테인먼트 및 자율주행 등에 높은 안정성과 신뢰성을 확보할 수 있는 QNX 를 사용하지 않는다. 리눅스가 QNX 대비 상대적으로 보안에 취약한 이유는 간단하다. Linux는 오픈 플랫폼이기 때문에 코드 및 커널 정보가 공개되어 있기 때문이다. 즉 보안성의 측면에서 QNX 가 리눅스 대비 확실한 장점을 가지고 있다.
따라서 전통 완성차 제조사들이 통합제어를 위한 OS 개발시 Linux만을 고집할 이유는 없으며, 각각의 영역에서 요구되는 기능과 환경에 따라 하이퍼바이저 기반 멀티 OS 구현이 나은 선택일 수도 있다.
실제로 대부분 완성차 OEM들은 SDV로의 전환시 안전부품 영역에는 임베디드 시스템에서의 신뢰성과 안정성이 높은 QNX를, 인포테인먼트와 같은 편의부품 영역에는 다양한 기능 확장이 가능한 리눅스를 기반으로 한 멀티 OS를 적용할 계획인 것으로 알려졌다.
인포테인먼트 OS: 오픈 소스 소프트웨어 중심 시장 성장 예상
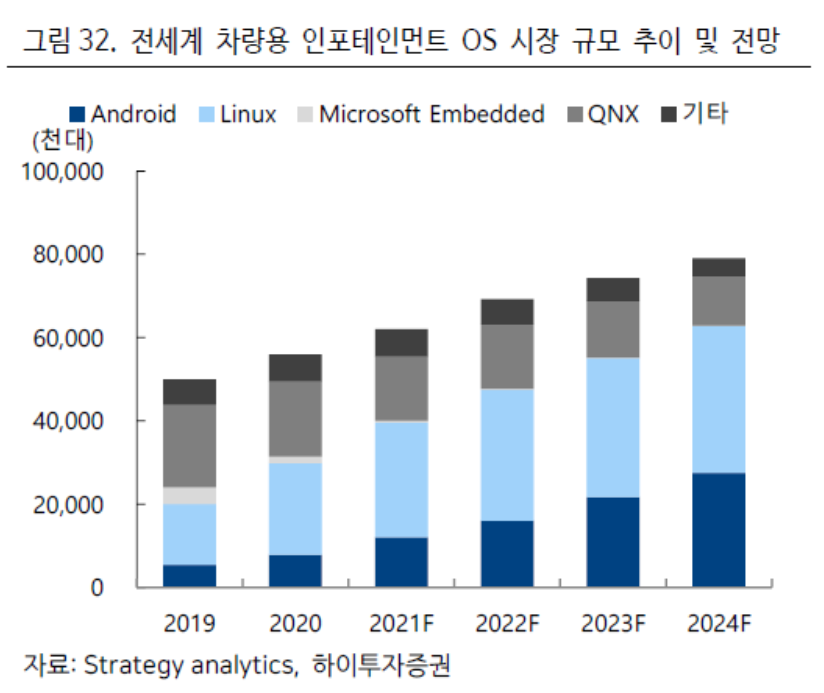
차량용 인포테인먼트 시스템 내에서 다양한 사용자 경험과 소비자들의 요구에 따라 새로운 기능 확장이 가능한 더 나은 OS 의 필요성이 높아지고 있다. IVI(In-vehicle infotainment) 시스템은 크게 두 가지로 구분된다.
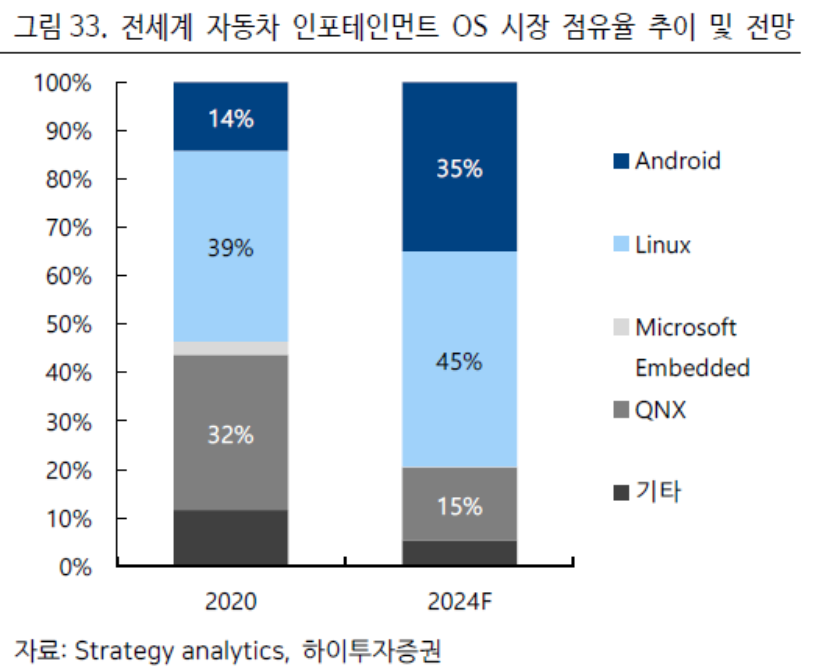
Blackberry QNX 와 같은 폐쇄형 소프트웨어를 기반으로 하는 것과 Linux 및 Android 와 같은 오픈 소스 소프트웨어를 기반으로 하는 것이다. 현재 차량용 인포테인먼트 OS 시장은 각 완성차 제조사별 요구 사항에 맞춰 대부분 오픈 소스 플랫폼 아키텍처를 활용하는 방향이다.
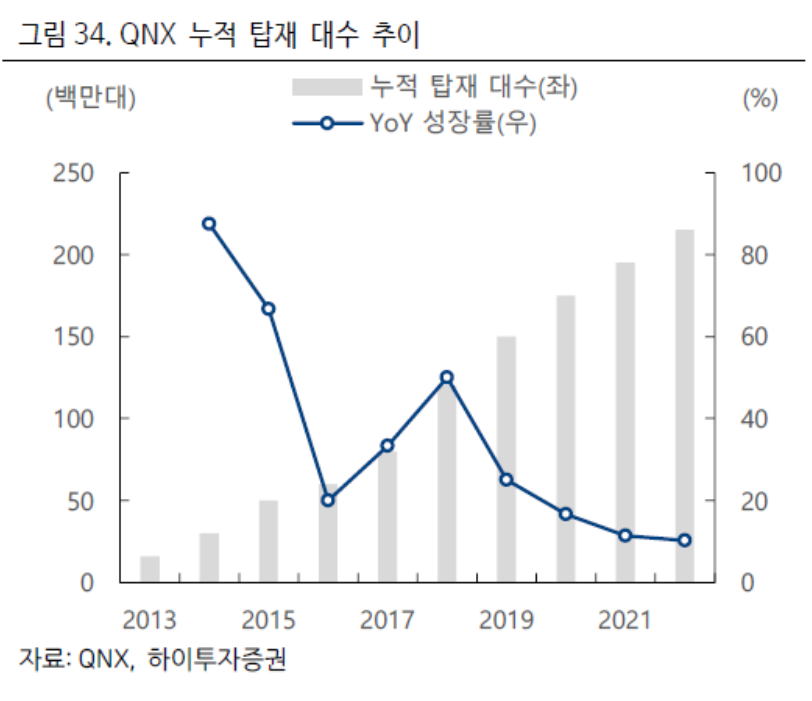
QNX 는 임베디드 시스템에서 주로 사용되는 BlackBerry 에서 개발한 유닉스 계열 RTOS(실시간 운영체제)로서 자동차 ECU, 인포테인먼트 시스템 및 안전 문제 관리를 위해 최적화된 운영체제 및 서비스를 개발해왔다.
특히 높은 신뢰성과 보안을 보장할 수 있다는 장점을 내세워 차량 내장형 시스템 전반에 걸쳐 활용된다. 그러나 향후 차량용 인포테인먼트 OS 시장에서는 오픈 소스 시스템의 확산으로 선두주자인 QNX의 채택이 점차 줄어들 것으로 예상된다.
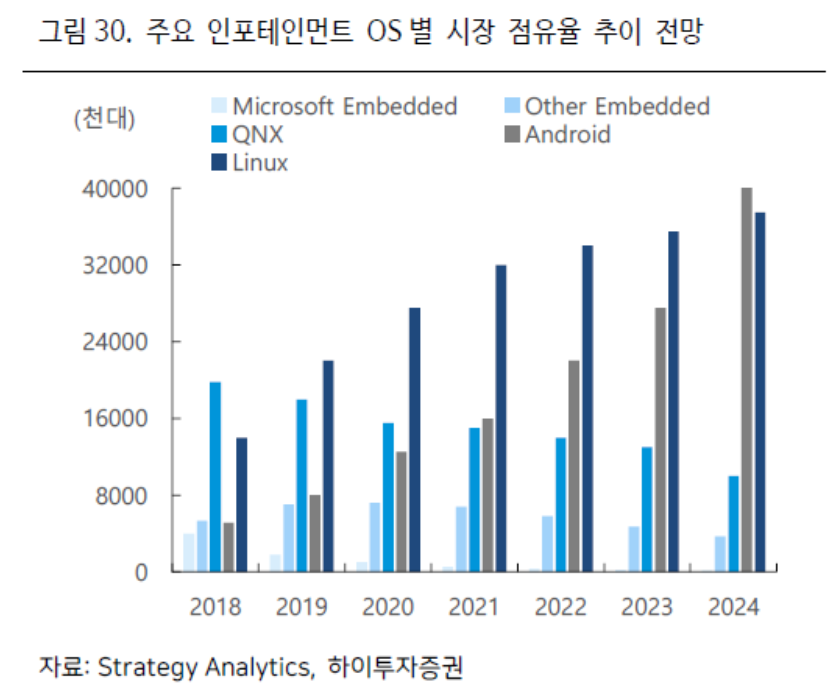
소비자들에게 익숙한 인포테인먼트 환경 제공하는 안드로이드 오토모티브 OS 채택 확대
안드로이드 오토모티브는 차량 내 IVI 시스템에서 직접 실행되는 운영체제로서, 인포테인먼트 환경을 지원하는 고도의 맞춤설정이 가능한 풀스택(GUI 프론트엔드부터 데이터베이스 백엔드에 이르는 모든 소프트웨어), 오픈소스 플랫폼이다.
참고로 Android Auto 는 사용자의 휴대전화에서 실행되는 플랫폼으로, USB 연결을 통해 호환되는 차량용 인포테인먼트 시스템이다. 안드로이드 오토모티브는 차량용 인포테인먼트 시스템의 높은 개방성과 확장성을 제공하고 다양한 어플리케이션을 통해 소비자들의 맞춤형 설정도 가능하다.
안드로이드 오토모티브는 기존 안드로이드용으로 개발된 것은 물론 안드로이드 오토용으로 개발된 앱까지 지원한다. 따라서 기본 내장된 어플리케이션뿐만 아니라 수많은 개발자들이 참여해 만든 다양한 어플리케이션을 실행시킬 수 있다는 장점이 있다. 이에 따라 자동차 제조사들의 채택이 빠르게 증가하면서 차량용 인포테인먼트 OS 시장에서 점유율을 확대해 나갈 것으로 전망된다.
AGL 은 리눅스 기반 자동차 어플리케이션용 오픈 소스 소프트웨어 솔루션
최근 자동차 제조사들은 하드웨어 제조 시스템뿐만 아니라 소프트웨어 생태계 개발에도 집중하고 있다. 이에 따라 많은 개발자들의 참여로 개발 시간과 비용을 단축하고 확장성이 좋은 오픈 소스 소프트웨어의 필요성이 높아지는 추세이다.
AGL(Automotive Grade Linux)은 리눅스 기반 자동차 어플리케이션용 오픈 소스 소프트웨어 솔루션이다. 오픈 플랫폼의 특성상 자동차 제조사, 부품/소프트웨어 공급업체 등이 모두 참여해 SDV 를 위한 완전 개방형 소프트웨어 스택 개발 및 채택을 가속화하는 것을 목표로 하고 있다.
대표적으로 현재 SDV 를 구현 중인 Tesla 도 리눅스 기반 차량용 OS 를 활용해 차량 하드웨어 비용과 성능을 최적화하는 소프트웨어를 채택하고 있으며, 현대차, Land rover, Toyota, Nissan 등과 Intel, 삼성전자, Panasonic 등이 AGL 프로젝트에 참여 중이다.
ADAS/자율주행 OS: 절대강자 QNX
ADAS(Advanced Driver Assitance Systems)는 첨단 운전자 보조 시스템으로, 첨단 감지 센서와 GPS 통신, 지능형 영상 장비를 이용하여 주행을 돕는 기능을 말한다.
대표적인 ADAS 기능으로 LKA(차선 이탈 방지 보조), DAW(운전자 주의 경고), HDA(Highway Driving Assist, 반자율주행)가 있으며, 현재 대부분의 차량에서 이용할 수 있다.
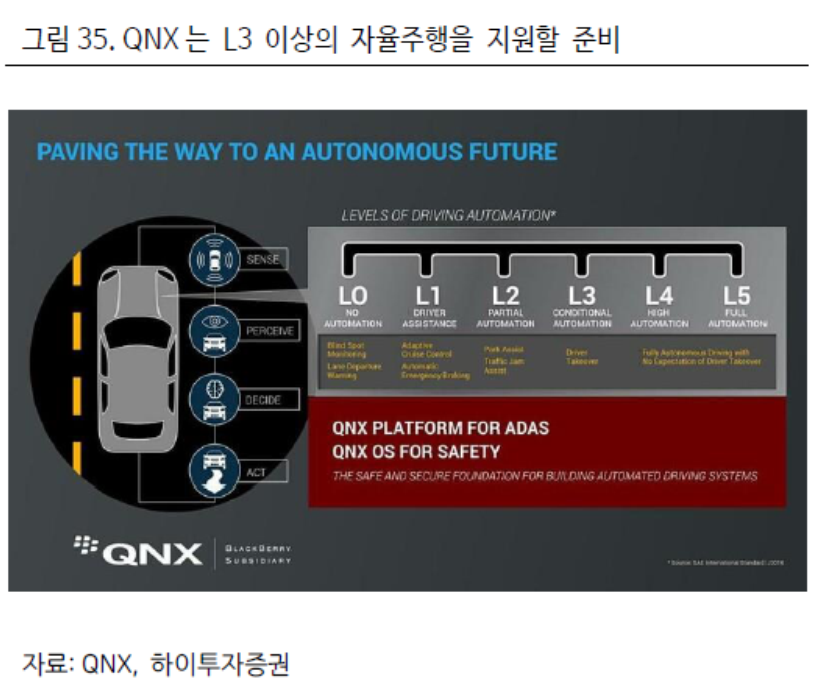
L3 이상의 자율주행은 현재 일부 지역에서 승인이 이뤄짐에 따라 본격적인 시장 성장을 앞두고 있다. 이와 같은 주행 관련 기능은 다른 기능보다 실시간 제어가 중요하다. 주행 중에 갑자기 전방에 나타난 보행자를 피하기 위해 핸들을 돌렸을 때, OS의 Latency(반응 지연)가 발생한다면 큰 사고가 발생할 수있다.
즉 안전성을 위해 차량의 주행을 제어하는 OS는RTOS(Real Time Operating System), 실시간 운영 체제의 방식으로 구성하여 보다 신속하게 데이터를 처리하고 주행과 관련된 기능을 제어하게 된다.
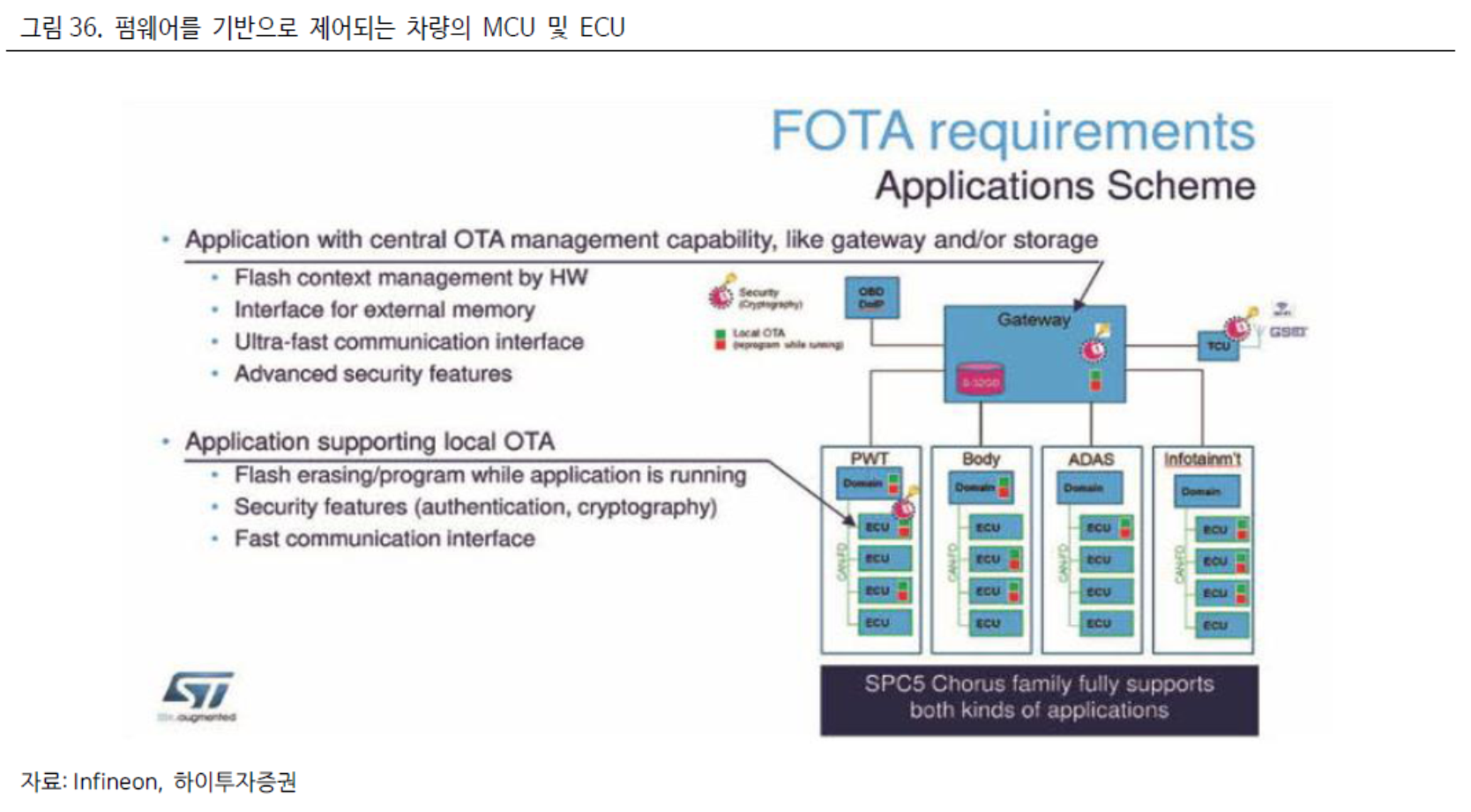
Body/Drive/Power Train: Firmware. RTOS로 구성
Tesla를 제외한 대부분의 경우, 차량의 Body/Drive/Porwer Train기능은 중앙 집중형 SoC가 아니라 AutoSAR 표준을 따르는 MCU에 의해 구동된다. AutoSAR(Automotive Open System Architecture)는 차량의 전자 제어 시스템에 사용되는 오픈 플랫폼이다.
차량의 전장화가 이루어짐에 따라 아키텍처가 복잡해지며 탑재되는 MCU 및 ECU의 개수가 기하급수적으로 증가했다. 이에 MCU 및 ECU를 제어하기 위한 별도의 소프트웨어의 표준을 확립하기 위해 완성차 OEM 및 주요 Tier 1 업체들은 AutoSAR를 설립, 차량 내부 제어 소프트웨어 표준을 설정했다. 2005년 AutoSAR 1.0을 시작으로 현재 BMW, Ford, 현대자동차, Bosch, Continental이 참여하고 있다.
FreeRTOS, 펌웨어: MCU를 작동시키는 대표적인 방법
MCU를 작동시키는 방법에는 크게 ① FreeRTOS, ② 펌웨어와 같이 두가지가 있다.
FreeRTOS는 타 RTOS 대비 용량이 작기 때문에, 메모리 공간이 적은 MCU에 사용하기 적합하다. FreeRTOS는 일반적으로 컴파일된 단일 형태로 메모리에 플래시되어 사용된다. 하지만 단일 Kernel만을 제공하고 있기 때문에 각종 Driver Kit, Network Stack, Library은 MCU 공급 업체의 SDK를 통해 구축해야 하는 단점이 있다.
또 하나의 구동 방식 중 하나인 펌웨어는 MCU에 입력되어 있는 일종의 마이크로 컨트롤러이다. 펌웨어 방식은 OTA를 통해 새로운 소프트웨어를 MCU의 메모리에 저장하게 된다. 새로운 소프트웨어가 문제가 생겼을 때를 대비하여 이전 소프트웨어를 메모리에 저장하는 Fallback Mechanism이 대표적인 기능이라고 할 수 있다.
출처: 하이투자증권, BCG, Mckinsey, Marklines, Infineon, QNX, Strategy Analytics
뜨리스땅
https://tristanchoi.tistory.com/619
자동차 기술 탐구 - SDV란? (4) 통합형 OS의 중요성
중앙집중형 E/E 아키텍처를 동작시키기 위한 통합형 OS 개발 필수 SDV로의 변화에서 높은 안정성과 신뢰도 기반 소프트웨어 플랫폼은 중앙집중화된 E/E 아키텍처 도입과 함께 반드시 병행되어야
tristanchoi.tistory.com
https://tristanchoi.tistory.com/618
자동차 기술 탐구 - SDV란? (3) 자동차의 두되이자 심장이될 AP
자동차 통합된 시스템 구축 위해서는 고성능 SoC 프로세서가 핵심 스마트카의 핵심인 연결성, 자율주행, 그리고 이를 구현하기 위한 전동화 기술에 공통적으로 필요한 요소 기술이 중앙집중형
tristanchoi.tistory.com
https://tristanchoi.tistory.com/617
자동차 기술 탐구 - SDV란? (2) 중앙집중형 E/E 아키텍처
수십 개의 ECU가 복잡하게 연결된 구조의 분산형 E/E 아키텍처에서는 SDV 구현 불가능 전통적 차량의 E/E 아키텍처는 게이트웨이(서로 다른 근거리 네트워크간 연결 지점)를 중심으로 기능에 따라
tristanchoi.tistory.com
https://tristanchoi.tistory.com/616
자동차 기술 탐구 - SDV란? (1) SDV의 정의 및 의미
스마트카의 핵심은 연결성, 자율주행 그리고 이를 구현하기 위한 전동화 스마트카는 사람과 사물의 이동성을 제공하는 이동수단이라는 전통적인 본질에 IT기술을 융합시켜 각종 편의 기능과 안
tristanchoi.tistory.com
'자동차 산업' 카테고리의 다른 글
| 자동차 기술 탐구 - SDV란? (7) P/Q/C 관점에서 바라본 SDV의 효용 (1) | 2024.03.08 |
|---|---|
| 자동차 기술 탐구 - SDV란? (6) SDV Value chain으로 침투하는 빅테크 (3) | 2024.03.07 |
| 자동차 기술 탐구 - SDV란? (4) 통합형 OS의 중요성 (0) | 2024.03.05 |
| 자동차 기술 탐구 - SDV란? (3) 자동차의 두되이자 심장이될 AP (0) | 2024.03.04 |
| 자동차 기술 탐구 - SDV란? (2) 중앙집중형 E/E 아키텍처 (0) | 2024.03.03 |




댓글