로봇에 의해 인간의 영역이 잠식당할 것이란 우려는 생각보다 오래전부터 형성되어 왔다. 로봇기술이 비약적으로 발전한 것도 역시 그렇다. 그럼에도 불구하고 왜 로봇은 세상을 바꾸지 못했으며, 인간은 여전히 노동의 주체로 굳건한 위상을 가지고 있을까?
1. 인공지능의 한계: 스스로 인지-판단 여전히 어려움
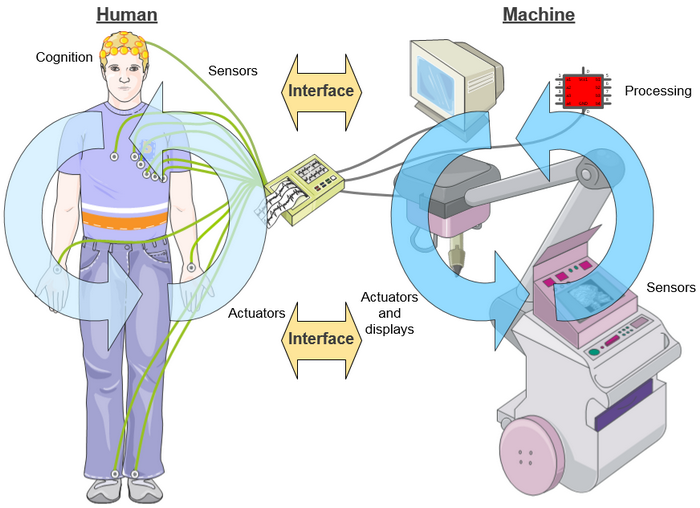
아직까지 로봇은 100% 자율적으로 기능할 수 없다. 로봇은 인지-판단-제어의 3 단계 영역을 스스로 해낼 수 있어야 비로소 기계가 아닌 로봇으로 인정받을 수 있다.
하지만 지금까지의 로봇은 대부분 인간에 의한 인지-판단 이후 HMI(Human-Machine Interface)를 통해 인간이 명령한 범위에서만 제어하는 기계 수준에 머물렀다.
이는 혁신의 상징 테슬라가 Fremont 공장을 세팅하며 100% 자동화된 공정(일명 에일리언 드레드노트: Alien Dreadnought)을 선보이겠다고 도전했다가 실패하며 ‘생산지옥’을 겪었던 것으로도 잘 알 수 있다.
당시 일론머스크는 “(완전 자동화를 위해) 공장 곳곳에 복잡한 네트워크를 설치했지만 작동하지 않아 모든 것을 제거했다.”라고 인터뷰했다. 과도하게 로봇을 신뢰한 것이 실패의 원인이라는 것이다. 물론 기가 상하이가 공개되었을 때 로봇 의존도는 Fremont 에 비해 월등히 높아졌고, 자동화율도 크게 상향되었지만 역시 100% 자동화는 달성하지 못했다.

지금까지의 로봇기술 수준은 인간이 만든 논리회로, 코딩에 의해서만 움직여왔기에 한정된 영역에서만 단순반복 작업만을 해왔다.
다시 말해 완전자율이 아닌, 부분자율 로봇이 현행 기술이 제공하는 한계라 말할 수 있다. 결국 인지-판단을 스스로 할 수 있어야 하는데, 여기엔 고도의 AI 기술이 필수적으로 요구된다. Human-In-The-Loop (인간 오퍼레이터)가 필요 없는 로봇이 탄생해야 비로소 로봇이 세상을 바꿀 수 있게 된다는 의미다.
2. 제한된 용도에서만 이용가능: 다기능로봇의 부재
로봇의 용도는 여전히 제한적이다. 대부분 사람들이 꿈꾸는, 이상적인 로봇은 어떤 환경, 어떤 업무에서도 인간처럼 알아서 척척 다 해주는 다기능(Multifunction/Tasking) 로봇일 것이다.
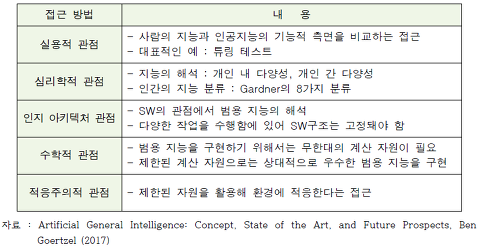
로봇에 대한 사람들의 생각을 살펴보면, 제한된 공간, 일정한 용도에서만 단순, 반복적으로 기능하는 로봇이 아닌, 어떠한 환경에서도 스스로 기능하는 AGI(범용인공지능)을 탑재한 로봇을 원하고 있다.
인간의 명령어인 자연어도 완벽히 알아듣고, 어디서든지 자유롭게 기동하며, 어떤 상황에서도 정교한 작업이 가능하고, 무거운 물건도 들 수 있을 정도로 Payload 가 높아야 하며, 다양한 서비스도 척척 제공할 수 있어야 한다는 것이다.
하지만 이렇듯 많은 것을 해결할 수 있는 AGI 는 모든 AI 연구자들의 궁극적인 꿈이며, 이의 완성에는 굉장히 오랜 시간이 걸릴 수밖에 없다. 일부 연구자들은 절대 AGI 기술은 완성되기 어렵다는 견해를 밝히기도 한다.
아마도 앞으로 제한된 용도의 로봇이 한 분야에서 기능적으로 성숙되며 점차 고도화되다가, S/W, H/W, Platform 등 아키텍처가 융복합되고, 다양한 데이터가 클라우드에 쌓이며 초고속통신으로 연결되는 등 통합과정을 겪으며 Multi-tasking Robot 으로 점차 진화되어 갈 것이다.
가정용 휴머노이드 로봇이 매뉴얼대로 청소를 하다가 바둑판 앞에 앉으면 알파고와 통신으로 Interaction 하며 세계 최강의 바둑기사로 순식간에 변할 수 있다는 뜻이다. 아직까지의 로봇기술은 제한된 용도로 사용할 수밖에 없으며 다기능 로봇은 요원해 보일 수밖에 없다.

3. 인간에 맞춰져있는 환경: 로봇을 위한 환경을 조성해줘야
Robotic Automation 의 어려움도 로봇의 성장에 걸림돌이다. 인공(人工)적인 모든 것들은 당연히 인간의 신체구조, 습관, 동선 등 인간공학의 관점에서 설계되었다.
로봇이 인간을 대체하기 위해선 기존에 세팅되어 있는 환경을 그대로 두는 한 인간처럼 일할 수 있어야 한다. 하지만 인간근로자와 같은 방식으로 로봇을 움직여 실제 인간의 작업을 모사하는 것은 매우 어렵다.
결국 장치, 설비 등을 로봇친화적으로 뜯어고치지 않으면 안되는 것이다. 가정으로 무대를 옮겨 생각해봐도 마찬가지다.
기존의 싱크대, 세탁기, 냉장고, 식기세척기 등은 모두 평균적인 인간의 신체구조에 맞체 세팅이 되어있다. 컵이나 접시, 프라이팬 등은 손가락 다섯개와 양팔을 가진 사람에게 적합하게 디자인되어 있다.
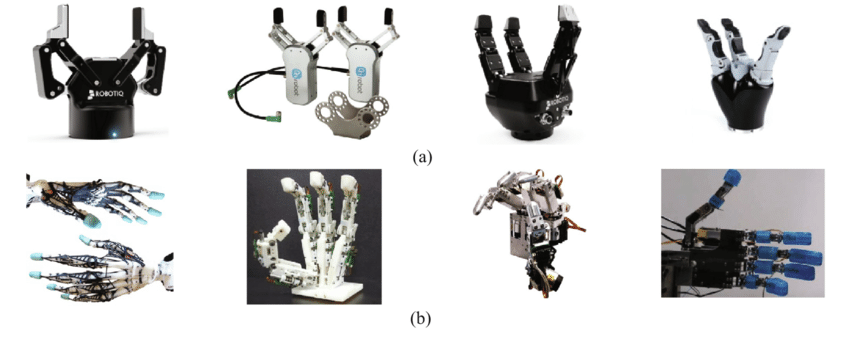
적어도 로봇이 인간의 일을 수행하기 위해서는 손가락 5 개인 덱스트러스 방식의 End effector 는 로봇이 이를 이용하기 위해서는 인간과 유사한 구조로 작업을 수행할 수 있어야 한다. 아니라면 처음부터 로봇친화적인 구조로 설계가 되어야 할 것이다.
4. 여전히 로봇의 인지 능력 불안전: 물리세계에 대한 디지털의 몰이해
가장 기초적인 것 같지만 로봇에게 세상을 보는 방법을 완벽히 학습시킬 수 없었다는 점도 문제다. 인지-판단-제어 중 가장 첫 단계인 ‘인지’ 영역부터 막혔다는 의미다.
인간처럼 대상을 보기 위해선 대상을 감지하는 것도 중요하지만 주변부에 대한 판단도 함께 이루어져야 한다. 2 차원으로 사물을 볼 수밖에 없는 카메라가 그동안 주변부와 대상을 분별하기 어려웠기에 Rader, Lidar 같은 다양한 센서를 함께 사용했어야만 했다. 이들 비전센서를 퓨전시키는 것도 쉬운 기술이 아니었던 것이다.
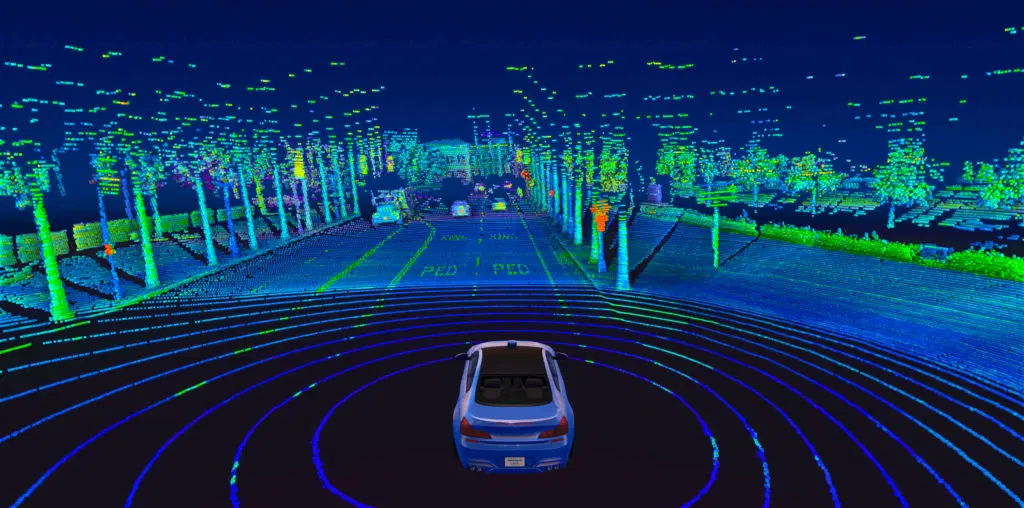
예를 들어 어떤 물건을 집어 어딘가에 가져다 놓는 작업을 한다면, 대상을 정확히 찾아내고 주변부를 판단해 경로도 설정하고 적당한 거리까지 이동해 정확히 Pick & Place 를 해야 한다. 이 모든 명령을 하기에 지금까지는 방대한 데이터와 코딩이 필요했던 것이다.
설령 해냈다 하더라도 시각과 동시에 주행거리에 대한 계획을 세우고 대상까지 도달하기엔 바닥의 기울기나 지면과의 마찰, 원심력, 중력에 대한 이해가 필요하며 빛의 굴절과 왜곡현상에 대해서도 이해가 필요했다.
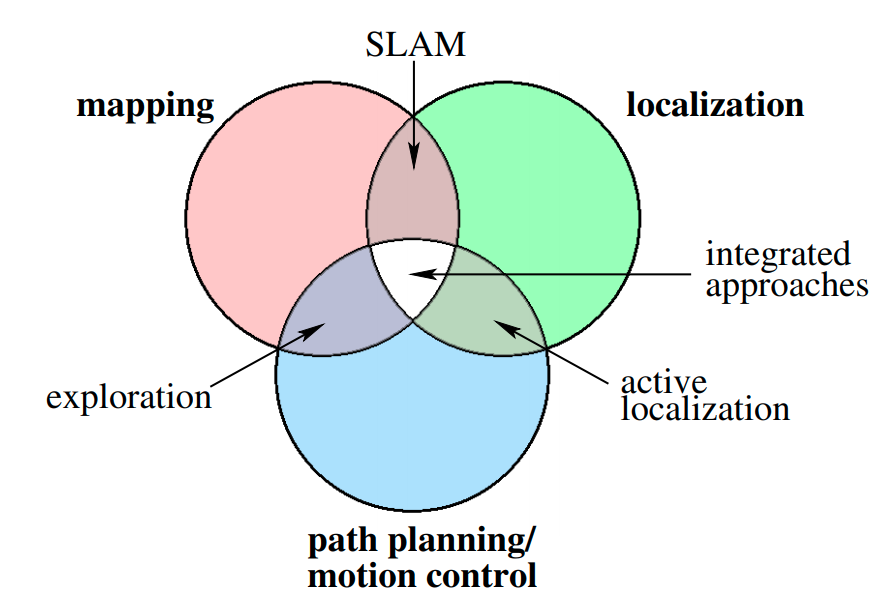
당연히 도로에서의 자율주행이나 실내에서의 로봇이 이동경로를 최적화할 수 있는 측위와 동시에 맵핑하는 기술, 즉 SLAM (Simultaneous localization and mapping)도 요구되었다.
지금까지 이런 복잡한 과정을 쉽게 해결해줄 수 있는 기술이 부재했던 것이 로봇의 활용을 주저하게 만든 것이다. 최근엔 이런 문제점들을 해결하고자 디지털 트윈 공간에서 물리법칙을 학습시키는 툴이 다양하게 제공되고 있다. 디지털이 물리세계를 점점 이해하기 시작했다는 점은 매우 고무적이다.
5. 아직 낮은 수준의 에너지 효율
현재 기술로는 로봇을 가동하는데 있어 에너지 비효율이 너무 심하다. 기존의 산업용 로봇은 고정된 채 작업을 했기에, 전기 플러그로 전원공급이 가능했다. 따라서 에너지에 대한 고민은 크지 않았다.
반면, 이동이 가능한 로봇은 내장되어 있는 배터리에서 에너지를 공급받아야 한다. 배터리가 차지하는 공간이 너무 커지면 로봇의 활용도가 떨어지거나 가격이 상승하는 단점이 있다.
제대로 된 로봇이라면 이동(Mobility)과 작업(Manipulating), 연산(Computing)과 통신(Connectivity) 등 다양한 방면에서 다량의 에너지를 필요로 할 것이다. 이동과 작업에 필요한 에너지도 부족한 마당에 인지-판단에 너무 많은 에너지가 소모되는 것이다.
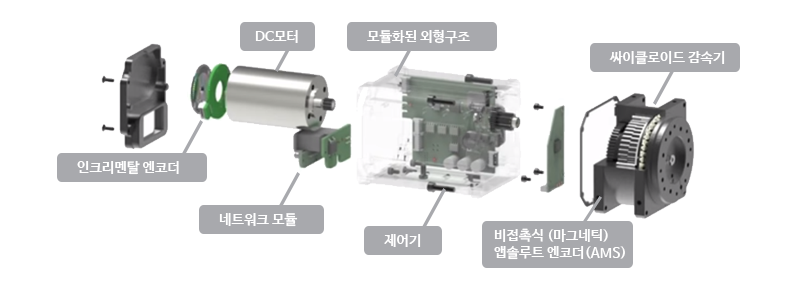
여기엔 기계공학의 한계도 거론된다. 로봇 팔 하나에만 6 개 이상의 액츄에이터(모터, 감속기, 엔코더)가 들어가는데, 모터와 기어에 의해 제어되는 기계공학의 특성상 대용량 에너지원이 필요할 수밖에 없다.
여기에 클라우드와의 실시간 커넥팅, 엣지컴퓨터의 가동, 센서의 쉼없는 정보생성, 빅데이터의 송신까지 처리하려면 로봇의 가용시간이 너무 짧아지는 한계가 있었던 것이다. 에너지 효율이 아주 높은 로봇이나 차세대 배터리가 요구되는 이유다. 혹은 지속적으로 에너지를 공급받을 수 있는 새로운 체계가 마련되어야 한다.
6. 통신속도의 제한으로 인한 클라우드 로보틱스의 한계
또 문제가 되는 것은 통신속도의 한계에 있다. 5G 기술에 대한 기대감이 컸지만, 통신사들의 투자대비 효율에 의문이 제기되면서 ‘0 Latency’(지연성 제로) 환경이 제공되지 않고 있다.
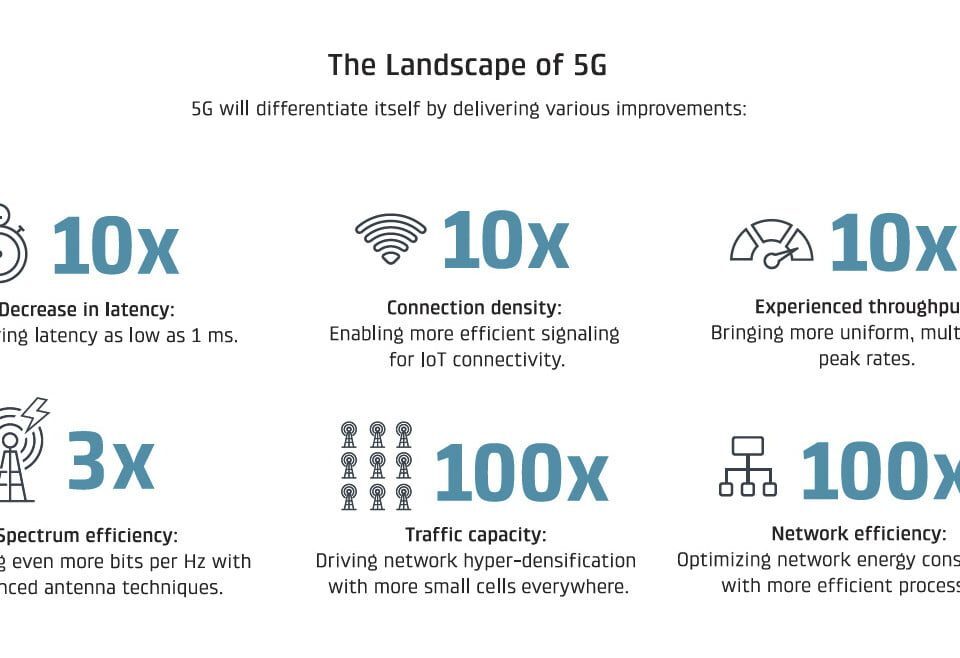
기대를 모았던 5G 로보틱스, 클라우드 로보틱스, 브레인리스 로보틱스는 모두 지연성이 0 인 상태에서 통신에 의존해 로봇을 가동시키는 기술들이었다.
인간의 뇌는 연산부와 저장부가 별도로 있다. 마찬가지로 AI 도 연산부와 저장부가 있는데 이들의 유기적 연결을 위해서는 클라우드와 엣지 디바이스에 해당하는 로봇간 지연없는 연결이 전제되어야 한다. 그렇지 않고서는 가뜩이나 에너지 소모가 심한 로봇에 대용량 컴퓨터가 내장되어야 한다.
위와 같이 많은 난제들이 앞을 가로막고 있기에 오랜기간 로봇이 인간을 대체할 것이란 우려와 기대의 공존에도 불구, 로봇은 공장이나 물류센터에 한정된 용도로 사용될 뿐이었다. 쉽지 않은 문제들을 풀고자 하는 많은 시도들이 전개되고 있고, 해결 기대감은 점차 커지고 있는 상황이다.
많은 분야에서 로봇의 용도를 확산시키는 핵심 기술들을 발전시키고 있고, 최근에는 가시적인 성과들이 나타나고 있다. 특히 가장 어려운 인공지능이 고도화되고 있다.
로봇이 로봇다워질 기술적 변곡점이 오고 있는 것이다.
to-be continued...
출처: 하이투자증권, 전자신문, 머니투데이, KIET, 로보티즈, 테슬라
뜨리스땅
https://tristanchoi.tistory.com/322
로봇 산업 탐구: 3. 로봇이 활성화되는 기술적 토양
지금껏 로봇에 대한 유토피아적 기대와 디스토피아적 우려가 공존하며 계속 토론의 주제가 되고 있음에도 불구하고 현실에서는 로봇의 존재가 미미했던 게 사실이다. 사람을 대신해 시킬 수 있
tristanchoi.tistory.com
'로보틱스' 카테고리의 다른 글
| 로봇 산업 탐구: 5. 테크기업들의 진출 - 엔비디아 (0) | 2022.08.24 |
|---|---|
| 로봇 산업 탐구: 5. 테크기업들의 진출 - 테슬라 (0) | 2022.08.23 |
| 로봇 산업 탐구: 4. 로봇의 등장을 요구하는 사회적 토양 (1) | 2022.08.23 |
| 로봇 산업 탐구: 3. 로봇이 활성화되는 기술적 토양 (1) | 2022.08.22 |
| 로봇 산업 탐구: 1. 어디까지 왔나? (0) | 2022.08.22 |




댓글